Integration of the Reachy robot in MoveIt for ROS 1
- Install ROS Noetic on top of Ubuntu 20.04
- Install MoveIt 1
- Configure your ROS environment so that you can sucessfully compile your ROS workspace (e.g.
~/catkin_ws) withcatkin_makecommand cd ~/catkin_ws/src && git clone https://github.com/aubrune/reachy_moveit_configcd ~/catkin_ws/src && git clone https://github.com/aubrune/reachy_descriptioncd ~/catkin_ws && catkin_makesource ~/catkin_ws/devel/setup.bash
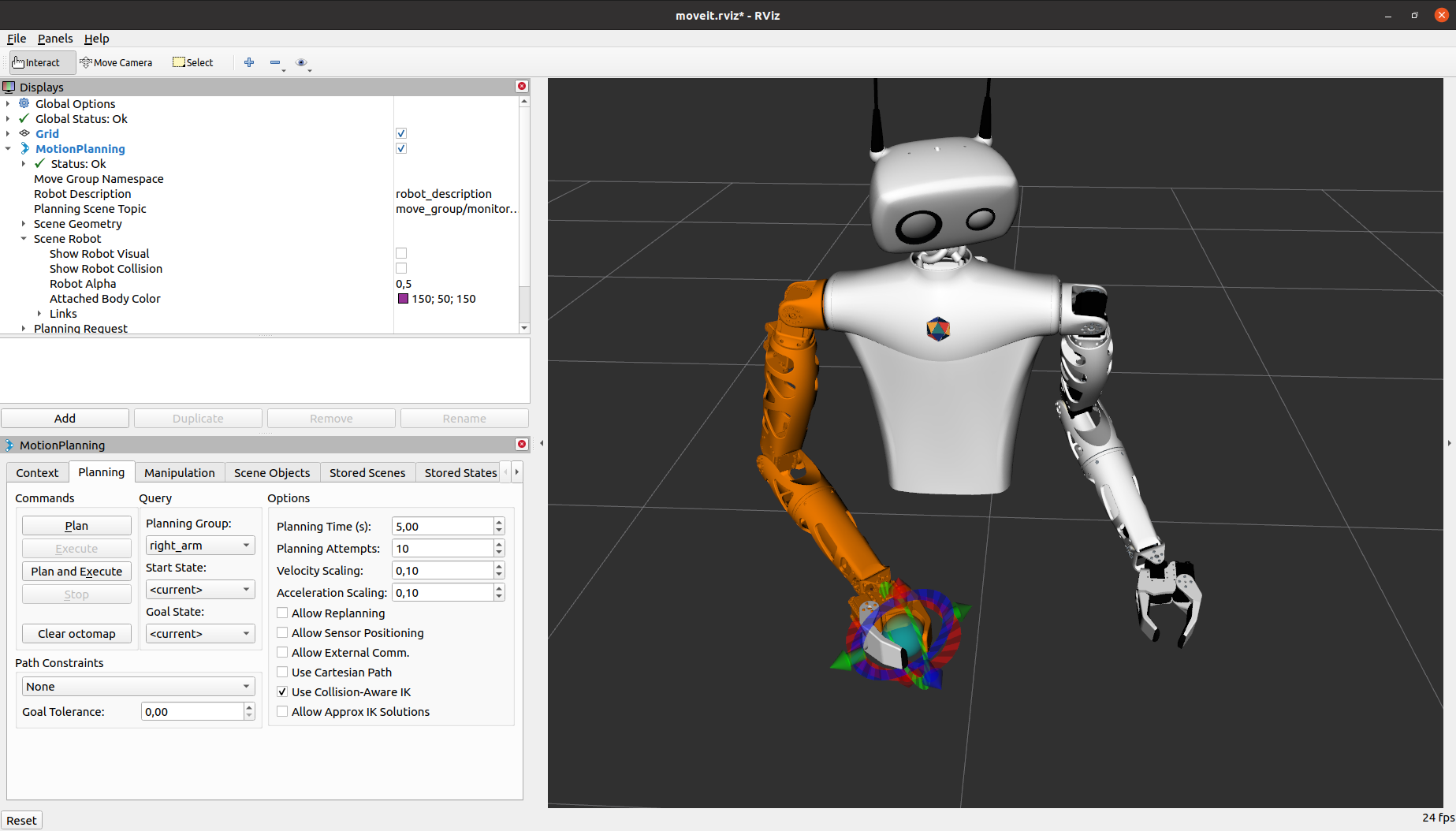
Just launch the regular MoveIt demo launch file:
roslaunch reachy_moveit_config demo.launch
Then pickup a group in the Query Planning Group from the Motion Planning panel (right arm, left arm or head) and move the blue ball appearing at the tip of the end effector to some goal pose. Then click Plan and Execute to plan a trajectory with obstacle avoidance and run it with fake trajectory controllers.
You can also use the regular MoveIt Python or C++ API.
If you are not using the Advanced Reachy configuration, you may disable parts of the robot, e.g. for the Basic configuration:
roslaunch reachy_moveit_config demo.launch left_arm:=false head:=false