ODE_LotkaVolterra
Path: Library models/Toy Models/Predator Prey/Lotka-Volterra (Influence of Integration Step).gaml
/**
* Name: ODE_LotkaVolterra
* Author: Huynh Quang Nghi & Nathalie Corson
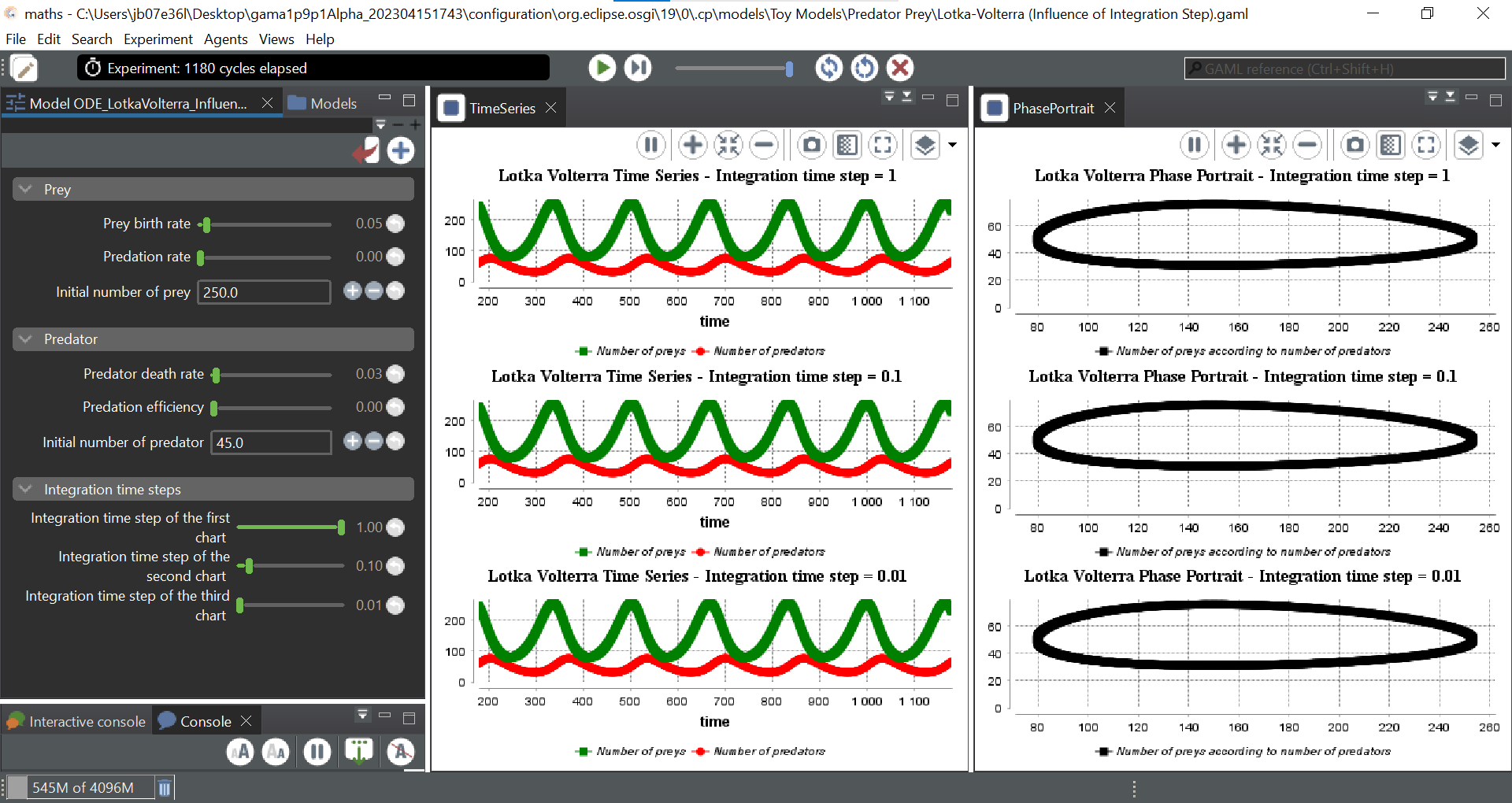
* Description: Lotka Volterra Predator Prey Model - ODE solved with Runge-Kutta 4 method with different integration time step
* Tags: equation, math
*/
model ODE_LotkaVolterra_InfluenceTimeStep
global {
float prey_birth_rate ; // natural birth rate of preys
float predation_rate ; // death rate of preys due to predators
float predator_death_rate ; // natural death rate of predators
float predation_efficiency ; // birth rate of predators due to prey consumption
float nb_prey_init ; // initial number of preys
float nb_predator_init ; // initial number of predators
float integration_step ; // integration time step of the Runge Kutta 4 method
float t; // simulation time : t = n * integration_time_step where n is the number of already computed time step
float integration_time_step1 <- 1.0; // first integration time step to compare
float integration_time_step2 <- 0.1; // second integration time step to compare
float integration_time_step3 <- 0.01; // third integration time step to compare
list<LotkaVolterra_agent> LV_agents;
init{
create LotkaVolterra_agent number: 1 with:[integration_time_step::integration_time_step1]; // creation of an agent containing the ODE model with an integration time step of value integration_time_step1
create LotkaVolterra_agent number: 1 with:[integration_time_step::integration_time_step2]; // creation of an agent containing the ODE model with an integration time step of value integration_time_step2
create LotkaVolterra_agent number: 1 with:[integration_time_step::integration_time_step3]; // creation of an agent containing the ODE model with an integration time step of value integration_time_step3
LV_agents <- list(LotkaVolterra_agent);
}
}
species LotkaVolterra_agent {
float nb_prey <- nb_prey_init ; // number of preys initialized with the values given by the user
float nb_predator <- nb_predator_init ; // number of predators initialized with the values given by the user
float integration_time_step ; // integration time step used in the Runge Kutta 4 method
equation lotka_volterra {
diff(nb_prey,t) = nb_prey * (prey_birth_rate - predation_rate * nb_predator); // evolution of the number of preys duting an integration time step
diff(nb_predator,t) = - nb_predator * (predator_death_rate - predation_efficiency * nb_prey); // evolution of the number of predator during an integration time step
}
reflex solving {
solve lotka_volterra method: "rk4" step_size:integration_time_step; // use of runge kutta 4 method with an integration time step of value integration_time_step
}
}
experiment maths type: gui {
parameter "Prey birth rate" var: prey_birth_rate <- 0.05 min: 0.0 max: 1.0 category: "Prey"; // the user defines the value of parameter prey_birth_rate on the interface, the default value is 0.05 and this value must be between 0 and 1
parameter "Predation rate" var: predation_rate <- 0.001 min: 0.0 max: 1.0 category: "Prey"; // the user defines the value of parameter prey_birth_rate on the interface, the default value is 0.001 and this value must be between 0 and 1
parameter "Predator death rate" var: predator_death_rate <- 0.03 min: 0.0 max: 1.0 category: "Predator"; // the user defines the value of parameter predator_death_rate on the interface, the default value is 0.03 and this value must be between 0 and 1
parameter "Predation efficiency" var: predation_efficiency <- 0.0002 min: 0.0 max: 1.0 category: "Predator"; // the user defines the value of parameter predation_efficiency on the interface, the default value is 0.0002 and this value must be between 0 and 1
parameter "Initial number of prey" var: nb_prey_init <- 250.0 min: 1.0 category: "Prey"; // the user defines the value of parameter predation_efficiency on the interface, the default value is 250, the minimum possible value is 1
parameter "Initial number of predator" var: nb_predator_init <- 45.0 min: 1.0 category: "Predator"; // the user defines the value of parameter predation_efficiency on the interface, the default value is 45, the minimum possible value is 1
parameter "Integration time step of the first chart " var: integration_time_step1 <- 1.0 min: 0.0 max:1.0 category: "Integration time steps"; // the user defines the value of the first integration step he wants to compare, the default value is 1 and this value must be between 0 and 1
parameter "Integration time step of the second chart " var: integration_time_step2 <- 0.1 min: 0.0 max: 1.0 category: "Integration time steps"; // the user defines the value of the second integration step he wants to compare, the default value is 0.1 and this value must be between 0 and 1
parameter "Integration time step of the third chart " var: integration_time_step3 <- 0.01 min: 0.0 max: 1.0 category: "Integration time steps"; // the user defines the value of the third integration step he wants to compare, the default value is 0.01 and this value must be between 0 and 1
output {
display TimeSeries type: 2d { // creation of a display to show time series of the model, values are plotted at every step. Since there is more than one chart plotted in one display, every chart has a position and a size
chart "Lotka Volterra Time Series - Integration time step = 1 " type: series background: #white position: {0,0} size:{1,0.33} x_range: 1000 { // one chart, of type 'serie', is named Lotka Volterra Time Series - Integration time step = 1, it shows quantities according to time, and the background is white
data 'Number of preys' value: first(LotkaVolterra_agent where (each.integration_time_step = 1.0)).nb_prey color: #green ; // number of preys in the case where the integration time step is 1 is plotted in green
data 'Number of predators' value: first(LotkaVolterra_agent where (each.integration_time_step = 1.0)).nb_predator color: #red ; // number of predators in the case where the integration time step is 1 is plotted in red
}
chart "Lotka Volterra Time Series - Integration time step = 0.1 " type: series background: #white position: {0,0.33} size:{1,0.33} x_range: 1000{
data 'Number of preys' value: first(LotkaVolterra_agent where (each.integration_time_step = 0.1)).nb_prey color: #green ;
data 'Number of predators' value: first(LotkaVolterra_agent where (each.integration_time_step = 0.1)).nb_predator color: #red ;
}
chart "Lotka Volterra Time Series - Integration time step = 0.01 " type: series background: #white position: {0,0.66} size:{1,0.33}x_range: 1000{
data 'Number of preys' value: first(LotkaVolterra_agent where (each.integration_time_step = 0.01)).nb_prey color: #green ;
data 'Number of predators' value: first(LotkaVolterra_agent where (each.integration_time_step = 0.01)).nb_predator color: #red ;
}
}
display PhasePortrait type: 2d {
chart "Lotka Volterra Phase Portrait - Integration time step = 1" type: xy background: #white position: {0,0} size:{1,0.33} { // creation of a display to show phase portrait of the model, values are plotted at every step. Since there is more than one chart plotted in one display, every chart has a position and a size
data 'Number of preys according to number of predators' value:{LV_agents[0].nb_prey, LV_agents[0].nb_predator} color: #black ; // number of predators are plotted in black according to the number of preys in the case where the integration time step is 1
}
chart "Lotka Volterra Phase Portrait - Integration time step = 0.1" type: xy background: #white position: {0,0.33} size:{1,0.33}{
data 'Number of preys according to number of predators' value:{LV_agents[1].nb_prey, LV_agents[1].nb_predator} color: #black ;
}
chart "Lotka Volterra Phase Portrait - Integration time step = 0.01" type: xy background: #white position: {0,0.66} size:{1,0.33} {
data 'Number of preys according to number of predators' value:{LV_agents[1].nb_prey, LV_agents[1].nb_predator} color: #black ;
}
}
}
}