- システム全体の中で3Dカメラシステムの制約は決まる。
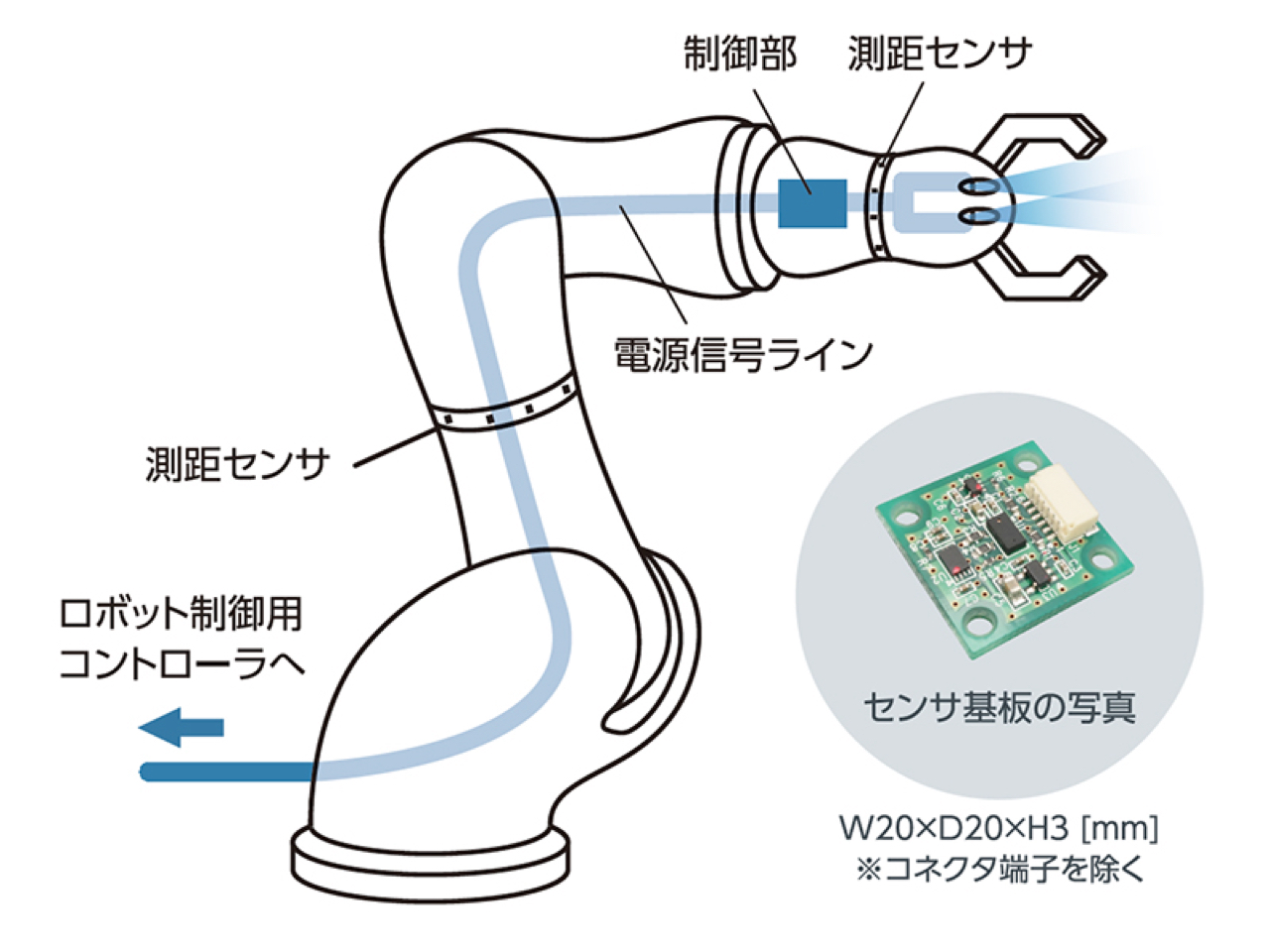
- アームの先のハンドのそばに付けるカメラは軽くなければならない。
- 重くなればなるほど、アームを駆動するモーターへの負荷が増える。
- 首長竜の頭部が、体の大きさに比べて小さいのは、首の付け根からのモーメントを小さくするためである。
- 頭部を重たくする場合には、モーメントを抑制するには、首を短くする。ー>象の頭部
- ハンドやグリッパーのカメラとすると、ハンドやグリッパーの動作のじゃまにならないようにする制約がつく。
- 狭い領域に対して手を入れて作業する内容を置き換えようとすると、ハンドやグリッパーのそばのカメラが基線長が大きいカメラであることは許されない。
- 基線長が短く、外形寸法の小さなものが求められる。
- 同じ場所にアクセスするときの機械的は位置の標準偏差(もしくは、その定数倍)
- これは産業用ロボットに固有の概念だと考える。
- 動物の動作において、毎回の動作が違っているのが当然である。
- 位置パラメータを目的の位置にするように制御する。
- 位置のエンコーダー出力が目的の値との残差を小さくするようにフィードバックをかける。
- 例:イチゴの収穫を考えてみよう。イチゴを潰さないようにするためには力の制御が必要になる。
- 触覚センサ・力覚センサ・近接覚センサ・トルクセンサ
-
協働ロボットに移行する時点で捨て去らなくちゃならない。
-
本質安全
-
機能安全
-
ぶつかなないように行動を計画すること。
-
仮にぶつかりそうになっても、被害を軽減できること。
-
ぶつかっても、人に怪我をさせない範囲の使い方をすること。
-
機能安全を実現するために必要になること
- 例:
- アーム(などロボット)の可動する範囲の近接物の計測することができること
- ロボットの可動範囲での動いているモノ・人の行動の予測ができること。
- それぞれの機器での危険を回避できるのに十分な見え方の多様性をカバーしていること。
- 掃除ロボットが、泥酔して倒れている人に怪我をさせないためには、倒れている泥酔者を検知できる必要がある。
- 注意点:一般の人検出モデルは、床付近の高さから見た、倒れている人の検出をするような学習用データは与えられていない。
「従来の協働ロボットは接触すると停止する機能が付いているが、新開発の「MZS05」では接触前に停止する機能を付与し、安全性をさらに高めた。」