原始Markdown文档、Visio流程图、XMind思维导图:https://github.com/LiZhengXiao99/Navigation-Learning
[TOC]
ORB 指 Oriented FAST and rotated BRIEF,是一种结合 FAST 和 BRIEF,并引入旋转不变性的一种特征点和描述子;SLAM 指 Simultaneous Localization and Mapping,指的是同时进行实时定位和地图构建。
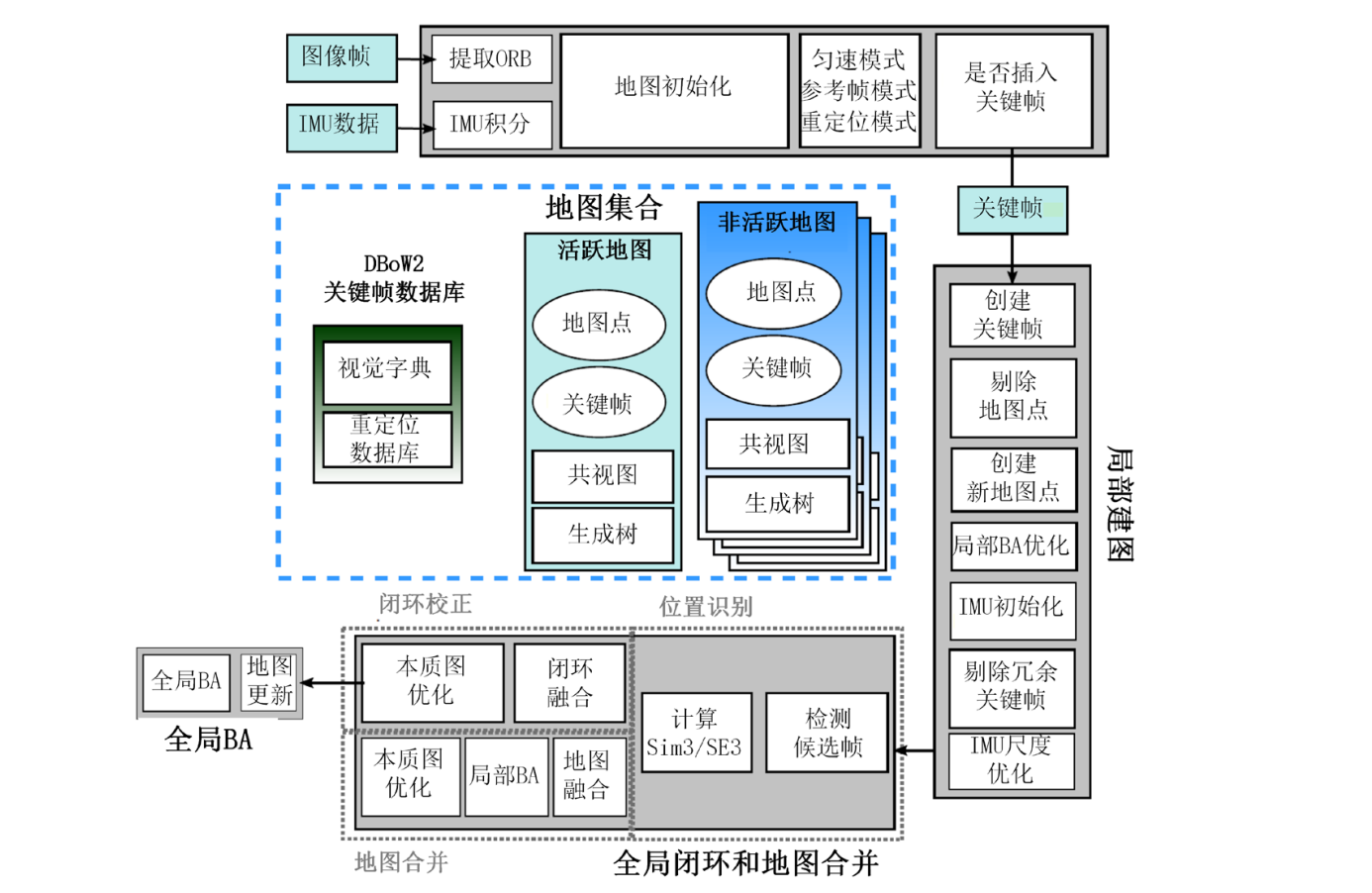
ORB-SLAM3 是迄今为止,最完整的视觉惯性 SLAM 系统系统,它是第一个集成了单目相机、双目相机、RGB-D相机,以及单目相机结合 IMU、双目相机结合 IMU 的 SLAM 系统。并且在 ORB-SLAM2 的基础上,改进了相机模型,使其不再局限于传统的小孔成像模型,而是可以扩展到鱼眼模型。在与 IMU 的结合上,它根据运动模型在流形上进行 IMU 的预积分的方式,然后采用非线性优化的思想,将 IMU 的预积分结果和视觉 SLAM 的重投影模型一同进行图优化,使得预积分残差以及重投影误差共同达到最小,以此来完成视觉信息和惯导系统的紧耦合。并且它采用了更为快速的初始化方法,以及丢失跟踪后利用惯导系统快速重定位方法。此外,它还采用地图集的方式,实现了对大场景的定位建图。这也是如今众多开源方案中,功能最强大、最精准的方法。系统框图如下:
源码:https://github.com/UZ-SLAMLab/ORB_SLAM3
文件结构如下:
- Examples 和Exampleold 根据传感器类型,分别存放新的和旧的代码实例。
- include 和 src 分别存放代码的 .h 头文件和 cc/cpp 原文件。
- Thirdparty 存放了 DBOW2、Sophus 和 g2o。
- DBOW2 是词袋模型,推荐博客:DBoW2库介绍
- Sophus 是李代数库,
- g2o 是图优化库,
- Vocabulary 存放 ORB 词典。
-
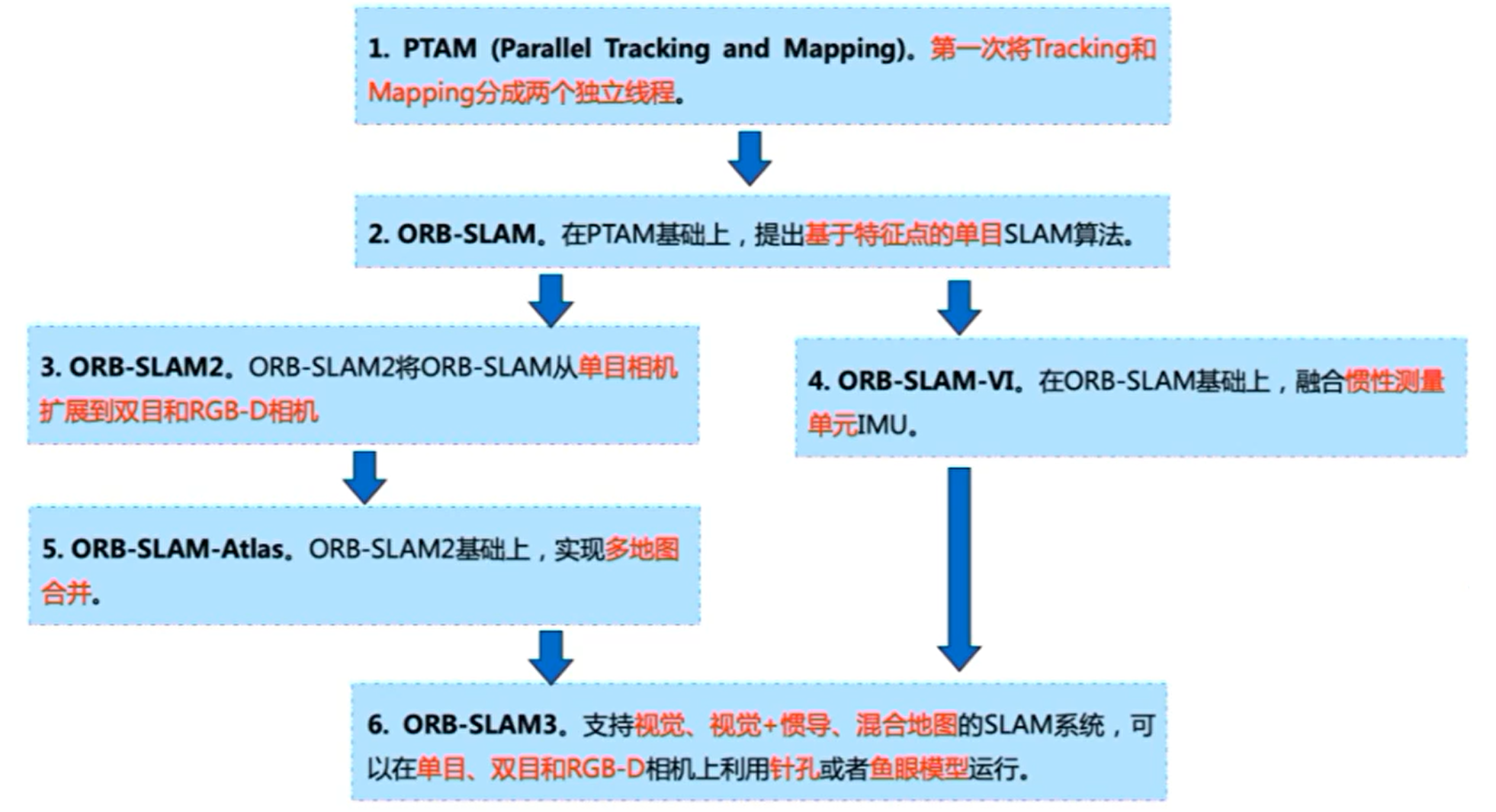
Parallel Tracking and Mapping for Small AR Workspaces,下载
摘要翻译:
- 本论文提出了一种在未知场景下估计相机位姿的方法。
- 尽管之前已经有了很多将 SLAM 应用于机器人的尝试,我们
- 我们将跟踪和建图分成两个单独的任务, 在双核计算机上以并行线程处理:
- 跟踪线程
- 建图线程根据之前观察到的视频帧生成点特征的三维地图。
- 这样就可以使用计算量大的批处理优化技术,对实时性要求没那么高。
- 该系统可绘制出包含数千个地标的详细地图,并可 以帧速率进行跟踪,其准确性和鲁棒性可与最先进的基于模型的系统相媲美。 先进的基于模型的系统
-
ORB-SLAM: a Versatile and Accurate Monocular SLAM System,下载
摘要翻译:
-
ORB-SLAM2: an Open-Source SLAM System for Monocular, Stereo and RGB-D Cameras,下载
摘要翻译:
-
ORB-SLAM3: An Accurate Open-Source Library for Visual, Visual-Inertial and Multi-Map SLAM,下载
摘要翻译:
-
Tracking 线程:接受一个关键帧,计算相机位姿,决定何时给局部建图插入一个关键帧,生成地图点;作为主线程一直执行。
在追踪线程,根据传感器的不同需要,选择不同的初始化方式。首先,对图像进行 ORB 特征提取与匹配,由于传统ORB 算法提取的特征点分布不均匀且误匹配率过高,因此本文基于 ORB-SLAM3 算法对特征匹配环节进行改进。首先在特征点提取过程利用四叉树策略将图像分为若干个网格,分别在每个网格中提取最佳特征点,然后在特征匹配阶段引入GMS 匹配方法,使用基于网格剔除误匹配的统计量筛选正确匹配,从而得到分布比较均匀且正确的匹配对;其次,利用恒速运动跟踪模型和参考帧跟踪模型计算初始位姿,两个模型分别用于正常跟踪模式与跟踪失败后的重定位;然后,跟踪局部地图以确定更多局部地图点与当前帧图像的特征匹配关系,进而基于图优化模型进一步优化相机位姿;最后,根据关键帧选取条件确定新关键帧。此外,IMU 模式中的跟踪线程还需要计算 IMU 预积分,从而使局部建图线程在视觉与IMU 结合后进行局部 BA 优化。
-
Localmapping 线程:操作局部图,进行局部 BA
局部建图线程的流程主要包含两方面,首先是对局部地图进行维护,即将新关键帧和地图点插入活动地图,同时剔除不满足条件的关键帧和地图点,然后进行局部 BA 进一步优化关键帧位姿和地图点空间坐标。因为 ORB-SLAM3 的传感器类型包含 IMU,所以该算法的局部地图构建线程还包括IMU 的初始化,该过程的目的是为了给局部 BA 和全局 BA提供一个更好的初始值以减少 IMU 噪声积累。
-
LoopClosing 线程:对关键帧处理,执行图优化,做全局 BA
回环检测线程主要包括回环检测和回环校正。首先在关键帧数据库中确认候选闭环帧,并与当前关键帧进行特征匹配,然后通过 Sim3 变换计算相似变换,其次当前帧的共视帧和候选闭环帧进行投影匹配,当匹配数满足相应条件时则可检测到回环,最后校正关键帧位姿和局部地图点三维坐标,并融合地图点和优化本质图。回环校正完成后 ORB-SLAM3 系统通过在独立线程中启动完整的 BA 细化地图映射,并且可保障实时性不受影响。
-
Viewer 线程:可视化
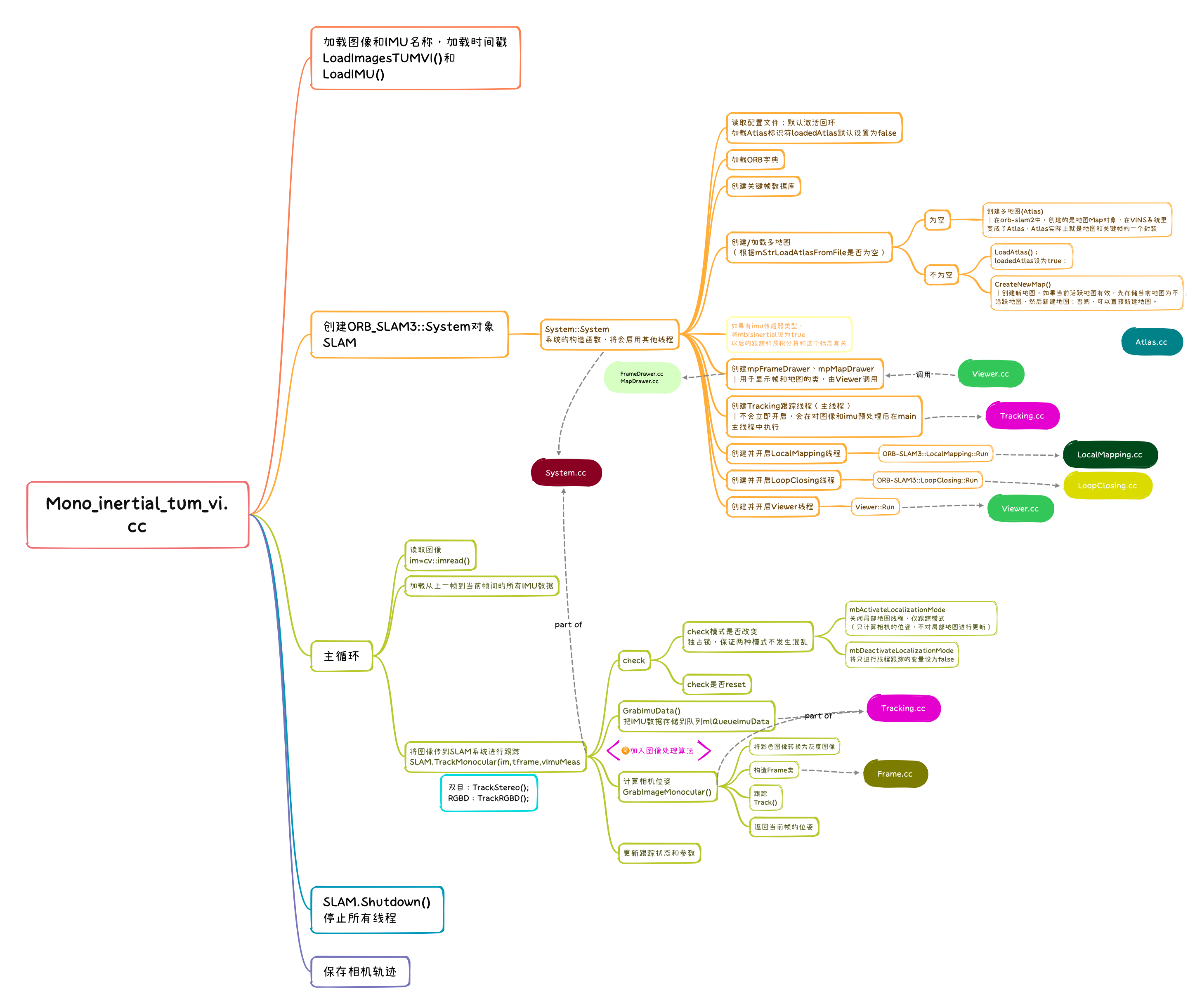
程序有很多的主文件,在 Examples 文件夹中,从网上找了张单目融合IMU的主文件流程图(Mono_inertial_tum_vi.cc)
int main(int argc, char **argv)
{
// 输出运行的序列数目
const int num_seq = (argc-3)/3;
cout << "num_seq = " << num_seq << endl;
bool bFileName= ((argc % 3) == 1);
string file_name;
if (bFileName)
file_name = string(argv[argc-1]);
cout << "file name: " << file_name << endl;
// 按照下面提示至少输入6个参数
if(argc < 6)
{
cerr << endl << "Usage: ./mono_inertial_tum_vi path_to_vocabulary path_to_settings path_to_image_folder_1 path_to_times_file_1 path_to_imu_data_1 (path_to_image_folder_2 path_to_times_file_2 path_to_imu_data_2 ... path_to_image_folder_N path_to_times_file_N path_to_imu_data_N) (trajectory_file_name)" << endl;
return 1;
}
// Load all sequences:
// 准备加载所有序列的数据
int seq;
vector< vector<string> > vstrImageFilenames; //图像文件名
vector< vector<double> > vTimestampsCam; //图像时间戳
vector< vector<cv::Point3f> > vAcc, vGyro; //加速度计,陀螺仪
vector< vector<double> > vTimestampsImu; //IMU时间戳
vector<int> nImages;
vector<int> nImu;
vector<int> first_imu(num_seq,0);
vstrImageFilenames.resize(num_seq);
vTimestampsCam.resize(num_seq);
vAcc.resize(num_seq);
vGyro.resize(num_seq);
vTimestampsImu.resize(num_seq);
nImages.resize(num_seq);
nImu.resize(num_seq);
int tot_images = 0;
// 遍历每个序列
for (seq = 0; seq<num_seq; seq++)
{
// Step 1 加载图像名和对应的图像时间戳
cout << "Loading images for sequence " << seq << "...";
LoadImages(string(argv[3*(seq+1)]), string(argv[3*(seq+1)+1]), vstrImageFilenames[seq], vTimestampsCam[seq]);
cout << "LOADED!" << endl;
// Step 2 加载IMU数据
cout << "Loading IMU for sequence " << seq << "...";
LoadIMU(string(argv[3*(seq+1)+2]), vTimestampsImu[seq], vAcc[seq], vGyro[seq]);
cout << "LOADED!" << endl;
nImages[seq] = vstrImageFilenames[seq].size();
tot_images += nImages[seq];
nImu[seq] = vTimestampsImu[seq].size();
//检查是否存在有效数目的图像和imu数据
if((nImages[seq]<=0)||(nImu[seq]<=0))
{
cerr << "ERROR: Failed to load images or IMU for sequence" << seq << endl;
return 1;
}
// Find first imu to be considered, supposing imu measurements start first
// Step 3 默认IMU数据早于图像数据记录,找到和第一帧图像时间戳最接近的imu时间戳索引,记录在first_imu[seq]中
while(vTimestampsImu[seq][first_imu[seq]]<=vTimestampsCam[seq][0]){
first_imu[seq]++;
cout << "first_imu[seq] = " << first_imu[seq] << endl;
}
// 因为上面退出while循环时IMU时间戳刚刚超过图像时间戳,所以这里需要再减一个索引
first_imu[seq]--; // first imu measurement to be considered
}
// Vector for tracking time statistics
vector<float> vTimesTrack;
vTimesTrack.resize(tot_images);
cout << endl << "-------" << endl;
cout.precision(17);
/*cout << "Start processing sequence ..." << endl;
cout << "Images in the sequence: " << nImages << endl;
cout << "IMU data in the sequence: " << nImu << endl << endl;*/
// Create SLAM system. It initializes all system threads and gets ready to process frames.
// Step 4 SLAM系统的初始化,包括读取配置文件、字典,创建跟踪、局部建图、闭环、显示线程
ORB_SLAM3::System SLAM(argv[1],argv[2],ORB_SLAM3::System::IMU_MONOCULAR, true, 0, file_name);
//遍历所有数据
int proccIm = 0;
for (seq = 0; seq<num_seq; seq++)
{
// Main loop
cv::Mat im;
//存放imu数据容器,包含该加速度,角速度,时间戳
vector<ORB_SLAM3::IMU::Point> vImuMeas;
proccIm = 0;
//直方图均衡化,直方图均衡化的思想就是这样的:
//假设我有灰度级255的图像,但是都是属于[100,110]的灰度,图像对比度就很低,我应该尽可能拉到整个[0,255]
cv::Ptr<cv::CLAHE> clahe = cv::createCLAHE(3.0, cv::Size(8, 8));
for(int ni=0; ni<nImages[seq]; ni++, proccIm++)
{
// Read image from file
// Step 5 读取每一帧图像并转换为灰度图存储在im,seq表示第几个数据集,ni表示这个数据集的第几个数据
im = cv::imread(vstrImageFilenames[seq][ni],cv::IMREAD_GRAYSCALE);
// clahe
//直方图均衡化
clahe->apply(im,im);
// 取出对应的图像时间戳
double tframe = vTimestampsCam[seq][ni];
if(im.empty())
{
cerr << endl << "Failed to load image at: "
<< vstrImageFilenames[seq][ni] << endl;
return 1;
}
// Load imu measurements from previous frame
//清空imu测量
vImuMeas.clear();
if(ni>0)
{
// cout << "t_cam " << tframe << endl;
// Step 6 把上一图像帧和当前图像帧之间的imu信息存储在vImuMeas里
// 注意第一个图像帧没有对应的imu数据 //?是否存在一帧,因为之前是从最接近图像第一帧的imu算起,可能无效
while(vTimestampsImu[seq][first_imu[seq]]<=vTimestampsCam[seq][ni])
{
vImuMeas.push_back(ORB_SLAM3::IMU::Point(vAcc[seq][first_imu[seq]].x,vAcc[seq][first_imu[seq]].y,vAcc[seq][first_imu[seq]].z,
vGyro[seq][first_imu[seq]].x,vGyro[seq][first_imu[seq]].y,vGyro[seq][first_imu[seq]].z,
vTimestampsImu[seq][first_imu[seq]]));
// cout << "t_imu = " << fixed << vImuMeas.back().t << endl;
first_imu[seq]++;
}
}
// cout << "first imu: " << first_imu[seq] << endl;
/*cout << "first imu time: " << fixed << vTimestampsImu[first_imu] << endl;
cout << "size vImu: " << vImuMeas.size() << endl;*/
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t1 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t1 = std::chrono::monotonic_clock::now();
#endif
// Pass the image to the SLAM system
// cout << "tframe = " << tframe << endl;
// Step 7 跟踪线程作为主线程运行
SLAM.TrackMonocular(im,tframe,vImuMeas); // TODO change to monocular_inertial
#ifdef COMPILEDWITHC11
std::chrono::steady_clock::time_point t2 = std::chrono::steady_clock::now();
#else
std::chrono::monotonic_clock::time_point t2 = std::chrono::monotonic_clock::now();
#endif
double ttrack= std::chrono::duration_cast<std::chrono::duration<double> >(t2 - t1).count();
ttrack_tot += ttrack;
// std::cout << "ttrack: " << ttrack << std::endl;
vTimesTrack[ni]=ttrack;
// Wait to load the next frame
// 等待读取下一帧
double T=0;
if(ni<nImages[seq]-1)
T = vTimestampsCam[seq][ni+1]-tframe;
else if(ni>0)
T = tframe-vTimestampsCam[seq][ni-1];
if(ttrack<T)
usleep((T-ttrack)*1e6); // 1e6
}
if(seq < num_seq - 1)
{
cout << "Changing the dataset" << endl;
// Step 8 更换数据集
SLAM.ChangeDataset();
}
}
// cout << "ttrack_tot = " << ttrack_tot << std::endl;
// Stop all threads
// Step 9 关闭SLAM中所有线程
SLAM.Shutdown();
// Tracking time statistics
// Save camera trajectory
// Step 10 保存相机位姿(轨迹)
if (bFileName)
{
const string kf_file = "kf_" + string(argv[argc-1]) + ".txt";
const string f_file = "f_" + string(argv[argc-1]) + ".txt";
SLAM.SaveTrajectoryEuRoC(f_file);
SLAM.SaveKeyFrameTrajectoryEuRoC(kf_file);
}
else
{
SLAM.SaveTrajectoryEuRoC("CameraTrajectory.txt");
SLAM.SaveKeyFrameTrajectoryEuRoC("KeyFrameTrajectory.txt");
}
sort(vTimesTrack.begin(),vTimesTrack.end());
float totaltime = 0;
for(int ni=0; ni<nImages[0]; ni++)
{
totaltime+=vTimesTrack[ni];
}
cout << "-------" << endl << endl;
cout << "median tracking time: " << vTimesTrack[nImages[0]/2] << endl;
cout << "mean tracking time: " << totaltime/proccIm << endl;
/*const string kf_file = "kf_" + ss.str() + ".txt";
const string f_file = "f_" + ss.str() + ".txt";
SLAM.SaveTrajectoryEuRoC(f_file);
SLAM.SaveKeyFrameTrajectoryEuRoC(kf_file);*/
return 0;
}