$ echo "source ~/'WORKSPACE_PATH'/install/setup.bash" >> ~/.bashrc
$ source ~/.bashrcroslaunch probot_grasping probot_anno_grasping_demo.launchroslaunch probot_grasping ibvs.launchrosservice call /conveyor/control "state: power: 12.0"q w e
a s d
z x c
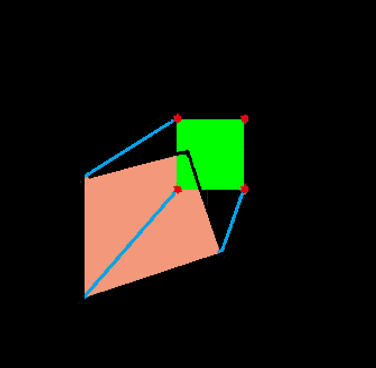
图像雅可比矩阵
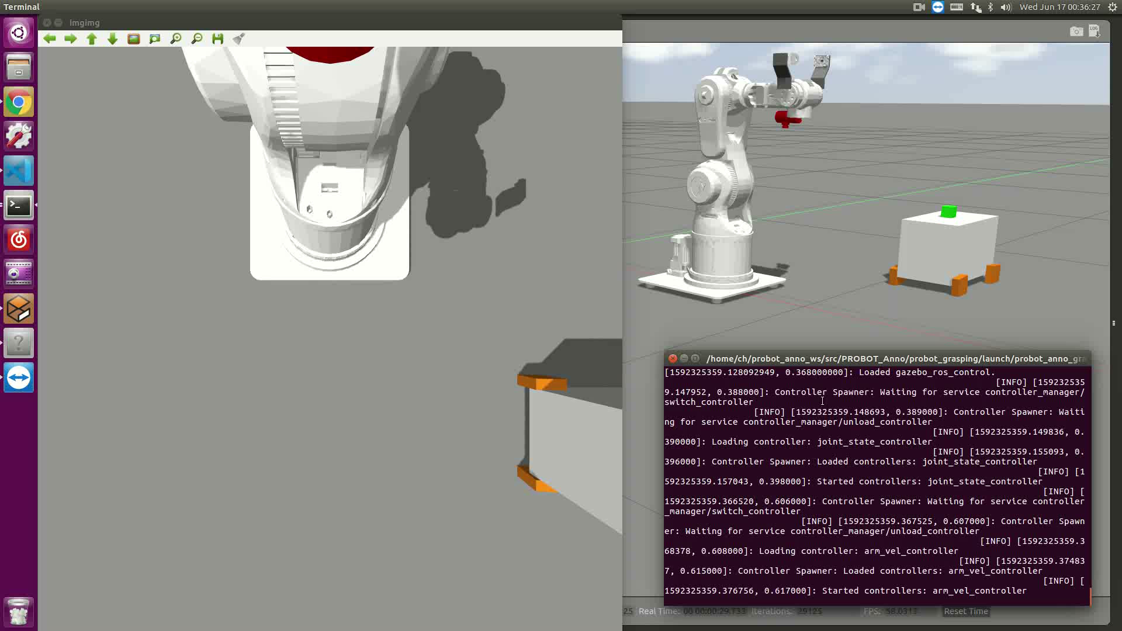
小车随动抓取
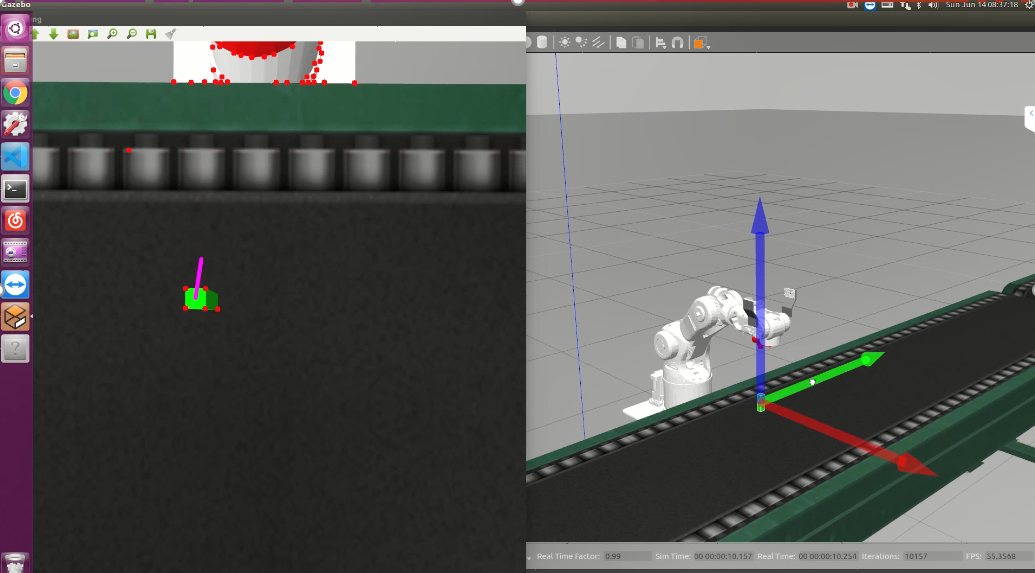
传送带随动抓取
sudo apt-get purge libopencv*
sudo apt autoremove
pkg-config opencv --modversion查看opencv版本,查不到,成功卸载。
sudo apt install build-essential
sudo apt install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev
sudo apt install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev
sudo add-apt-repository "deb http://security.ubuntu.com/ubuntu xenial-security main"
sudo apt update
sudo apt upgrade
sudo apt install libjasper1 libjasper-dev其中 libjasper1 是 libjasper-dev 的依赖包。 去官网下载Source源文件https://opencv.org/releases/ 解压到home/Tools下,新建build文件夹,进入build,
cmake -DCMAKE_BUILD_TYPE=Release -DCMAKE_INSTALL_PREFIX=/usr/local ..这里的/usr/local 是 OpenCV 的安装路径 多线程编译sudo make -j8
sudo make install添加路径
sudo gedit /etc/ld.so.conf.d/opencv.conf添加/usr/local/lib 保存配置
sudo ldconfig配置环境
sudo gedit /etc/bash.bashrc在文末添加
PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig
export PKG_CONFIG_PATH保存配置
source /etc/bash.bashrc更新
sudo updatedb测试安装成功与否
cd home/Tools/opencv/samples/cpp/example_cmake
cmake .
make
./opencv_example出现摄像头图像,即为成功。
git clone https://github.com/ps-micro/PROBOT_Anno查看ros版本:
/usr/bin/rosversion -d下载依赖包
sudo apt-get install ros-melodic-moveit-*
sudo apt-get install ros-melodic-industrial-*
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-ros-control ros-melodic-ros-controllers
sudo apt-get install ros-melodic-trac-ik-kinematics-plugin
sudo apt-get install ros-melodic-usb-cam更新源列表
sudo apt-get update安装可以更新的软件
sudo apt-get upgrade把文件夹放入catkin_ws/src中
catkin_make