- Aim is to build a modular robotic platform that will enable you to develop robotic systems on top of self-surviving (e.g. charge itself in unknown environments) and self localizing (using LIDAR systems) system.




RP-LIDAR 360 and Camera mounted Raspberry Pi will be the heart of this system. Raspberry Pi will utilize the following modules in order to achieve locatilaztion and self-charge from plugs;
- wheelModule
- 4 Independent Wheels & Encoders
- Arduino
- Esp8266
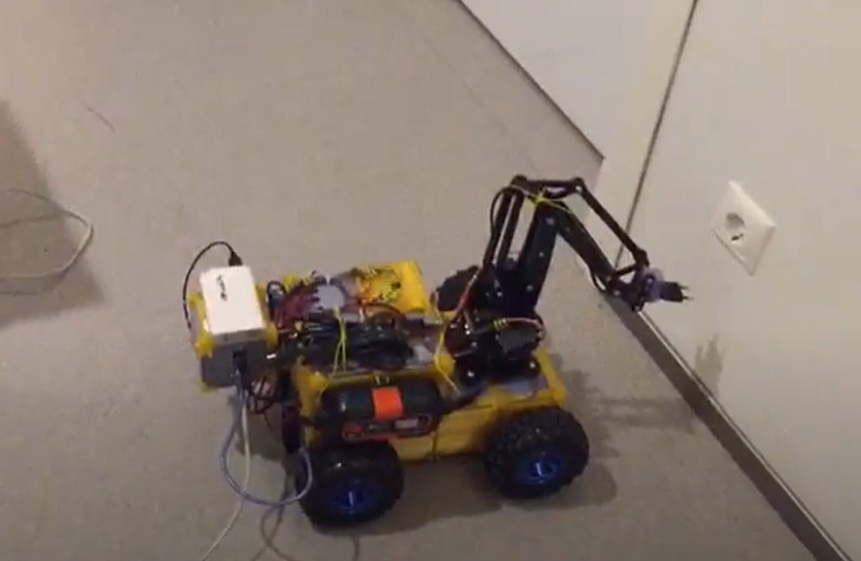
- roboticArmModule
- Robotic Arm
- Arduino
- Esp8266
- batteryModule
- accumulator (akü)
- brainModule
- Raspberry Pi (MQTT server, WiFi AccessPoint)
- Webcam (for recognition of wall outlets)
- Gürol Sağlam
- Sami Menteş
- Burak Kara
- Emir Ünlütürk
- Oğulcan Cingiler
- Mehmet Mert Özgün