使用VFH进行局部路径规划
局部路径规划(局部避障)常见的算法有人工势场(APF)、直方图法(VFH)和动态窗口法(DWA)。
VFH 算法主要是将无人机周围的环境转换成向量场直方图 , 根据极坐标直方图筛选出下一步可以通行的方向 , 并选取一个最优方向以一定的步长 行驶进入下一位置 。 当进入下一个位置后继续探测 , 直到达到目标点位置 。
VFH 主要包含3个步骤:
向量场直方图的建立
选定可通行扇区(或者扇区打分)
确定最优通行方向
与算法相关的程序有
- 主节点:
planner_node.cpp - 局部规划算法管理函数:
local_planning.cpp - 人工势场算法:
vfh.cpp - 轨迹可视化节点:
planning_visualization.cpp
local_plannning.cpp
订阅目标位置、局部地图和当前无人机odom,并调用局部算法程序(例如:apf.cpp, 'vfh.cpp',通过 "planning/algorithm_mode"来控制)生成控制指令,并发布该指令
nh.param("planning/algorithm_mode", algorithm_mode, 0); //用于设置运行算法的模式,apf=0(默认),vfh=1
订阅话题:
- "/prometheus/planning/odom_world"
- "/prometheus/planning/local_pcl",局部观测的点云数据,位于局部坐标系,需要通过odom 才能转化到全局map坐标系下面
- "/prometheus/planning/goal",目标点坐标,目标点是在全局坐标系map下给出的
发布话题:
- "/prometheus/planning/desired_vel" , 全局坐标系下的期望速度
- "/prometheus/planning/stop_cmd" ,当前飞行器是否安全
vfh.cpp
接收地图、起点和终点,并生成速度控制指令。
参数说明(可在launch文件中设置)
nh.param("vfh/inflate_distance", inflate_distance, 0.20); // 感知障碍物距离
nh.param("vfh/obs_distance", obs_distance, 3.0); // 感知障碍物距离
nh.param("vfh/max_att_dist", max_att_dist, 5.0); // 最大吸引距离
nh.param("vfh/safe_distance", safe_distance, 0.2); // 安全停止距离
nh.param("vfh/goalWeight", goalWeight, 0.2); // 目标权重
nh.param("vfh/prevWeight", prevWeight, 0.0); // 光滑权重
nh.param("vfh/obstacle_weight", obstacle_weight, 0.0); // 障碍物权重
nh.param("vfh/limit_v_norm", limit_v_norm, 0.4); // 极限速度
palnning_visualization.cpp
发布话题为“/planning_vis/trajectory”
planning_mission.cpp
该程序负责执行所有规划算法的任务:订阅规划算法发布的指令,处理后发送给底层控制程序。
程序运行逻辑:
- 选择规划算法,选择后飞机将自动解锁并起飞 cout << "Please choose the planning method: 1 for APF, 2 for A*, 3 for Fast planner"<<endl;
- 初始状态为等待规划算法发布指令(若不给定目标点,规划算法不发布) cout << "Waiting for trajectory" << endl;
- 当接收到指令后,则根据不同规划算法生成底层控制指令并发布,具体流程请查看源码
APF_planner();A_star_planner();Fast_planner();
- 若抵达目标点附近,则无人机悬停 if (distance_to_goal < MIN_DIS)
- 若接收到紧急停止指令,则无人机原地悬停 cout << "Dangerous! Hold there." << endl;
参数:
- 是否控制偏航角:若设为true,偏航角将根据规划出来的指令进行平滑更新,否则航向将打死为0度 nh.param("planning_mission/control_yaw_flag", control_yaw_flag, true);
主要订阅话题:
- 全局规划算法发布的路径指令 ros::Subscriber global_planner_sub = nh.subscribe<nav_msgs::Path>("/prometheus/planning/a_star/desired_path", 50, global_planner_cmd_cb);
- 局部规划算法发布的速度指令 ros::Subscriber local_planner_sub = nh.subscribe<geometry_msgs::Point>("/prometheus/planning/apf/desired_vel", 50, local_planner_cmd_cb);
- FastPlanner算法发布的控制指令(期望轨迹) ros::Subscriber fast_planner_sub = nh.subscribe<prometheus_msgs::PositionReference>("/prometheus/planning/fastplanner/desired_trajecotry", 50, fast_planner_cmd_cb);
- 紧急停止指令 ros::Subscriber stop_cmd_sub = nh.subscribe<std_msgs::Int8>("/prometheus/planning/stop_cmd", 10, stop_cmd_cb);
发布话题:
- 控制指令,发送给控制模块 [px4_pos_controller.cpp]的命令 command_pub = nh.advertise<prometheus_msgs::ControlCommand>("/prometheus/control_command", 10);
使用激光雷达作为传感器
- 运行launch文件(请查看launch文件参数说明,并进行调整) roslaunch prometheus_gazebo sitl_local_planning_3Dlidar_vfh.launch
- 在打开的rviz窗口中勾选
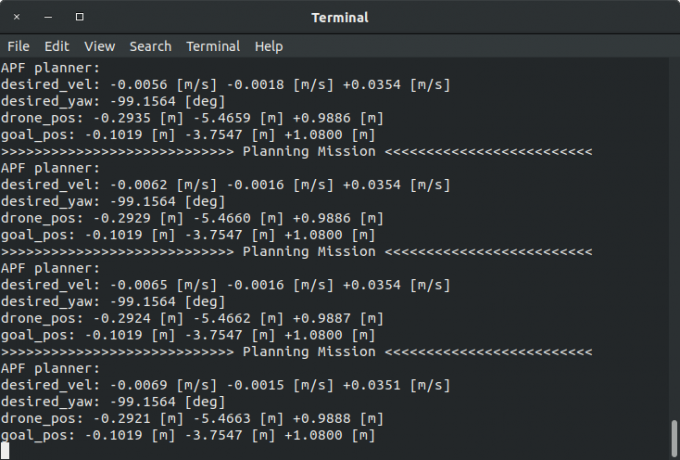
局部规划及Ground_Truth显示(绿色为真值,红色为激光雷达局部点云) - 输入1选择APF算法,无人机将自动起飞(这里使用APF来打印,但是算法已经切换到vfh)
- 在rviz中通过3D Nav Goal按钮指定目标点,点选该按钮后,同时按住鼠标左右键在rviz窗口中选择一点向上拉 ,然后释放
- 也可以通过终端发布目标点
rostopic pub /prometheus/planning/goal ... - 通过终端查看算法相关信息
运行截图 待补充
待补充