框选识别KCF&SiamRPN
本教程的目的:
- 理解框选识别程序背后的原理
- 掌握框选识别程序,并能够进行二次开发
- 学会使用控制接口,完成与识别追踪相关的飞行任务
- 订阅:
真实环境中订阅的相机话题为/prometheus/camera/rgb/image_raw
仿真环境中订阅的相机话题为/P300_Monocular_front/Monocular/image_raw
- 发布:
检测结果话题/prometheus/target (话题格式请参考Prometheus/Modules/msgs/msg/DetectionInfo.msg)
- 配置文件
真实环境中的配置文件为Prometheus/Modules/object_detection/config/camera_param.yaml
仿真环境中的配置文件为Prometheus/Modules/object_detection/config/camera_param_gazebo_monocular.yaml
注意修改kcf_tracker_h(跟踪框的实际高度)
- KCF算法介绍
KCF作为单目标跟踪的经典之作,在准确率和实时性上都有非常不错的表现,特别对算力要求不高。
算法亮点:
- 通过循环矩阵生成正负样本来训练脊回归分类器;
- 利用循环矩阵可DFT对角化的性质,将循环矩阵的求逆运算转化为向量的点乘;
- 针对线性不可分的情况,引入核技巧映射到高维,线性可分
具体可以参考博客
object_tracking.cpp
- 订阅来自图像的识别信息,这里使用了自定义的消息
prometheus_msgs::MultiDetectionInfo,具体消息格式可以在msgs文件夹中查看
ros::Subscriber vision_sub = nh.subscribe<prometheus_msgs::MultiDetectionInfo>("/prometheus/target", 10, vision_cb);-
执行追踪算法及追踪策略(请阅读源码进行学习)
-
发布上层控制指令
ros::Publisher command_pub = nh.advertise<prometheus_msgs::ControlCommand>("/prometheus/control_command", 10);- 参数
Thres_vision为视觉丢失阈值,kpx_track/kpy_track/kpz_track为控制参数,start_point_x/start_point_y/start_point_z/start_yaw为起始点位置,参数tracking_delta_x/tracking_delta_y/tracking_delta_z为追踪的前后间隔
- 运行启动脚本,注意修改参数配置文件
object_tracking.yaml,然后运行
roslaunch prometheus_gazebo sitl_kcf_detection.launch- 启动后,输入1启动任务,飞机将起飞至起始点,等待目标信息
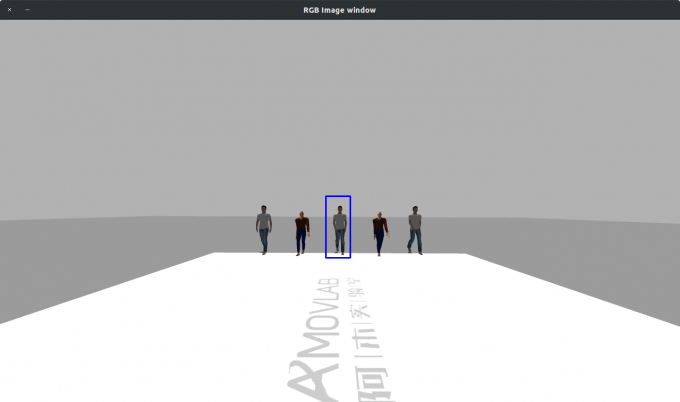
- 在弹出来的交互框中使用鼠标左键框选追踪目标,使用鼠标右键取消框选
- 飞机将飞向框选目标,完成任务
- 我们的测试相机是在京东购买的(仅供参考):https://item.jd.com/100006429489.html
# 首先启动相机节点,如下命令启动相机ID=0
roslaunch prometheus_detection web_cam0.launch
# 然后利用ros自带的标定程序对相机进行标定
rosrun camera_calibration cameracalibrator.py --size 8x6 --square 0.0245 image:=/prometheus/camera/rgb/image_raw
-
其中:size为标点板尺寸,square为每个方格宽度(m),image:=相机话题
-
棋盘格标定板下载地址:Chessboard
-
将得到的参数写入如下文件(有关目标尺度的预定义也在这个文件中):
Prometheus/Modules/object_detection/config/camera_param.yaml,例如参数如下:

- 标定板样张如下

- 以行人跟踪为例,结果如下,在
Prometheus/Modules/object_detection/config/camera_param.yaml中设置行人高度kcf_tracker_h为1.7m,并以此估计相机到目标的距离

{kind=link}
- 对于行人,90°视场角的相机,检测范围在1~20m,测距误差大概为距离的19%。
- KCF算法在TX2运行速度在25-30HZ之间
实际测试视频:video