- 1. Verwendete Techniken
- 2. Inhalte
- 3. Ausschlusserklärung
- 4. Lizenz
Q’s Train Project (QTP) dient dazu einen Zug-Fahrbetrieb zu simulieren.
Dabei gilt es Hard- und Softwarekomponenten aufeinander abzustimmen und einen möglichst automatisierten Betrieb zu
ermöglichen.
Der "echte" Zugebetrieb wird dabei von LEGO-Modellen simuliert.
Dieses Projekt beschäftigt sich mit allen auftretenden Fragen und Problemen welche sich dabei ergeben.
Die Dokumentation ist mit Asciidoctor erstellt.
Zur Verfügung stehen folgende LEGO Materialien:
Des Weiteren stehen zur Verfügung:
-
ein Raspberry PI
-
ein LEGO Mindstorms NXT
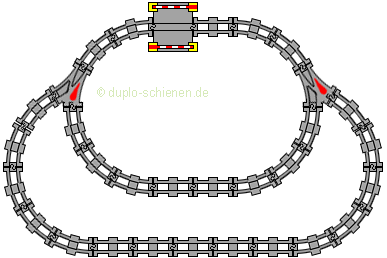
Zu Beginn wird ein einfacher Streckenaufbau gewählt, welcher mindestens die folgenden Kriterien erfüllt:
-
eine Weiche verbaut
-
alle Streckenabschnitte bilden einen Kreis
Denkbar wäre folgender Streckenaufbau:
Dieser Abschnitt enthält alle Anforderungen, welche es zu erfüllen gilt. Anfangs sind diese eher Ideen als konkrete Anforderungen. Mit Fortschritt des Projekts ändern sich die Anforderungen ggf. Lösungen werden anschließend vorgestellt und dokumentiert.
Über ein Schaltpult (Software oder Hardware) werden die Weichen umgeschaltet. Die Weiche darf nicht modifiziert werden (z.B. entfernen der Feder). Ein manuelles Umschalten an der Weiche selbst durch den Benutzer ist nicht gestattet.
Der erste Prototyp ist mit Hilfe von LEGO Mindstorms realisiert worden. Der Aufbau ist sehr einfach gehalten.
Die beiden Schalter dienen zur Ansteuerung, des Motors. Der Schalter rechts stellt die Weiche auf Durchfahrt. Der Schalter links stellt die Weiche auf "gebogener Zweig".
Beim Drücken eines Schalters, wird der Motor mit einer Kraft von 50% für 0,25 Sekunden vorwärts/rückwärts angesteuert und bremst anschließend.

Gewonnene Erkenntnisse
-
die Kraft des verwendeten Motors reicht aus,
-
es existieren sogar noch Reserven
Vorteile
-
es werden nur LEGO-Steine verwendet
-
einfache Software-Lösung
-
simple Baukonstruktion
Nachteile
-
"klobige" Baukonstruktion
-
nur drei Weichen ansteuerbar (es existieren nur drei Motoren)
Downloads
Der zweite Prototyp ist mit einem Micro Servo Motor realisiert. Dabei kam der Motor Mystery Micro Servo 9g SD90 zum Einsatz. Zur Ansteuerung des Servo-Motors wird ein Raspberry Pi B+ verwendet.
Technische Daten SD90 9g [1]
-
Speed: 0.12 second/60 degrees rotation
-
Torque: 1.3kg @ 4.8V~6V power
-
Comes with full ranged connectivity accessories and mounting screws
-
Dimensions: 53.6 mm x 52.4 mm x 12.5 mm
-
Weight: 24g
Der Motor wird mittels Pulsweitenmodulation (PWM) [2] mit einer Frequenz von 50 Hz (entspricht einer Periodendauer von 20ms) angesteuert. Die manuelle Vermessung ergab folgende Wertetabelle:
| ms | ° | % |
|---|---|---|
0,00 |
X |
0 |
0,10 |
X |
0,5 |
0,20 |
X |
1 |
0,30 |
0 |
1,5 |
0,65 |
30 |
3,25 |
1,00 |
60 |
5 |
1,35 |
90 |
6,75 |
1,70 |
120 |
8,5 |
2,05 |
150 |
10,25 |
2,40 |
180 |
12 |
10,00 |
X |
50 |
15,00 |
X |
75 |
20,00 |
X |
100 |
X = nicht möglich
Zur Befestigung des Micro-Servo-Motors an der LEGO Weiche wurde eine Basis-Plattform aus LEGO-Steinen realisiert. Anschließend muss der Motor in der richtigen Höhe auf die LEGO Basis-Plattform geklebt werden. Wichtig dabei ist, dass die Achse des Motors mit der Achse des LEGO Weichenhebels auf einer Linie ist. Daraus ergibt sich eine Höhe von 8 mm. Die Höhe der LEGO Basisplattform entspricht 6 mm. Um die fehlenden 2 mm zu überbrücken wurde eine abgelaufene Bahn-Card mit 1 mm Höhe zurechtgeschnitten und auf die Basis-Plattform geklebt. Anschließend kann der Motor aufgeklebt werden.
Der einfache Motorhebel wird an einem Ende abgeschnitten und mittig (90° Position) angebracht.
Damit eine physikalische Verbindung zwischen Motor und Weichenhebel besteht wird eine Heftzwecke durch das oberste Loch des Schalthebels gesteckt und ebenfalls verklebt.
Anschließend wurden die zwei Winkel bestimmt um die Weiche zu stellen:
-
50°
-
120°
Gewonnene Erkenntnisse
-
Die Kraft des verwendeten Motors bei 5V Versorgungsspannung reicht aus
Nächste Schritte
-
Verwendung mehrerer Motoren/Weichen
-
Erstellen eines CLI (Command Line Interfaces) zur gezielten Ansteuerung einer Weiche, z.B. schalte weiche1 1 für durchfahrt.
-
Bereitstellen eines GEhäuses um die "Elektronik" zu verstecken bzw. zu schützen.
Probleme
Einige Weichen ließen sich problemlos steuern, andere wiederum nicht, da diese sehr schwer zu stellen waren. Mithilfe von WD40 ist dem aber beizukommen.






Downloads
Folgende Informationen können hilfreich sein:
-
http://xn—jkel-loa.info/15.html -→ 9V Weiche, ggf. Anpassungen notwendig. Weiche wird verändert.
-
https://www.youtube.com/watch?v=o-S8ZbZiMNo&feature=relmfu&app=desktop -→ sehr kleine Lösung, aber wohl auch Modifizierung an Weiche notwendig.
-
http://www.mikrocontroller.net/topic/292609 -→ Interessanter Beitrag
-
http://www.1000steine.de/de/gemeinschaft/forum/?entry=1&id=243726
-
http://www.1000steine.de/de/gemeinschaft/forum/?entry=1&id=305552#id305552
-
Weitere Beiträge über Suchbegriffe wie "LEGO Weiche elektrisch ansteuern"
Ein Zug fährt über die Strecke und am Schaltpult/im Kontrollzentrum ist ersichtlich wo sich der Zug befindet.
Hier sind mehrere Ansätze möglich:
-
RFID/NFC
-
Magnete im "Gleisbett"
-
Lichtschranke am Gleis/Zug
-
Kombination aus allem
-
Barcodescanner am Zug und Barcodes am Gleis
-
Farbsensor am Zug und Farbcode am Gleis
-
Weitere Beiträge über Suchbegriff wie "Gleisbesetztmelder Modelleisenbahn".
Artikelsammlung:
Auf der Strecke werden mehrere 125 Khz RFID-Tags verteilt. Ein RFID-Lesegerät wird im LEGO-Zug verbaut und ließt die Karte beim Überfahren aus.
Aufgrund der geringen Baugröße (3,8 x 1,8 x 1,2cm) wurde ein 125Khz RFID RDM6300 - UART-Lesegerät verwendet.
Ein Auslesen von 125 Khz Tags bei Stillstand des Zuges hat problemlos geklappt. Im fahrenden Betrieb (auch bei Langsamfahrt) war ein Auslesen der RFID-Tags nicht mehr möglich.
Gewonnene Erkenntnisse
-
Das RFID-Lesegerät ließt 125 Khz Tags bei Stillstand des Zuges
-
Ein Auslesen eines Tags im Fahrtbetrieb ist nicht möglich

Auf der Strecke werden mehrere 13,56 Mhz RFID-Tags verteilt. Ein RFID-Lesegerät wird im LEGO-Zug verbaut und ließt die Karte beim Überfahren aus.
Als Lesegerät wurde ein MIFARE RC522-Modul verwendet.
Ein Auslesen von 13,56 Mhz RFID-Tags hat sowohl bei Stillstand und während der Fahrt des Zuges funktioniert. Aufgrund der größeren Baugröße (4,0 x 6,0 cm) war ein dezentes Verbauen im Zug nicht möglich.
Gewonnene Erkenntnisse
-
Das RFID-Lesegerät ließt 13,56 Mhz Tags sowohl bei Stillstand als auch während der Fahrt des Zuges
-
Die Baugröße dieses Moduls ist zu groß
Nächste Schritte
-
Es wird ein weiteres 13,56 Mhz RFID-Lesegerät mit geringerer Baugröße ausprobiert

Die Strecke wird in Abschnitte eingeteilt. Auf dem Schaltpult/im Kontrollzentrum ist zu sehen welcher Abschnitt zur Zeit von welchem Zug belegt wird.
Ein Zug welcher in einen "gesperrten" Abschnitt fährt wird automatisch gestoppt. Ein Weiterfahren dieses Zugs ist nicht mehr möglich. Er muss "resettet" werden (z.B. Aus- und wieder Einschalten)
Interessante Information zu einer möglchen Lösung:
Es ist auf dem Schaltpult/im Kontrollzentrum ersichtlich in welche Richtung ein Zug fährt.
Auf der Strecke herschen unterschiedliche Geschwindigkeitsbegrenzungen (z.B. keine, 80%, 50%, usw., ggf. auch absolut).
Ein Computerprogramm simuliert "Waren" in Form von Passagieren, Kohle, Güter, Nahrung, Tiere, Autos, usw.
Es gibt mehrere Bahnhöfe. Jeder Bahnhof produziert und konsumiert Waren.
Ein Zug kann Waren transportieren (z.B. Kohle).
Hält ein Zug an einem Bahnhof, werden Waren be- und entladen (sofern vorhanden).
Der Zugbetrieb ist vollständig automatisiert. Ein manuelles Eingreifen ist nicht mehr notwendig (vll. sogar möglich?)
LEGO® ist eine Marke der LEGO Gruppe, durch die die vorliegenden Inhalte jedoch weder gesponsert noch autorisiert oder unterstützt werden.
Alle Logos, Hersteller- und Produktnamen sind Warenzeichen ihrer jeweiligen Hersteller.
Copyright (c) 2014, Markus von Rüden.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Dieses Werk ist lizenziert unter einer Creative Commons Namensnennung - Nicht-kommerziell - Weitergabe unter gleichen Bedingungen 4.0 International Lizenz