Diese ISP ist im grunde einer STK500v1 auch bekannt als Arduino as ISP mit der erweitern Schnittstelle für das ATMega32 Board der IHK.
- ISP an Hand einer STK500v1
- Bedienung
- Bauteile die vernachlässicht werden können
- Programmieren der ISP
- Bestückungsplan
- Schaltplan
Das Board ist wie am Anfang genant eine STK500v1 und verhält sich auch so. Es registriert sich auf der Seite des PC als Serielle Schnittstelle.
Bevor Sie jedoch ihr zu Programirendes Board anschießen muss geprüft werden ob das zu programmirende Board eine eigene Spannungsversorgung hat und ob diese auf die AVR ISP Schnittstelle geführt wird. Sollte dies der Fall sein so entfernen Sie bitte JP2.
-
JP1 muss im normalfall immer auf der Stellung (2,3) sein. In der Stellung (1,2) ist die ISP im Selbst Programmiermodus und kann durch eine andere ISP geflasht werden.
-
Wenn die zu programmirende Board eine Stromaufnahme unter 100mA besitzt kann JP2 dazu genutzt werden die Board mit Spannung zu versorgen. Dies darf nur im Spannungfreien zustand des Bords genutzt werden
Wählen Sie unter Tools den Port Ihrer STK500v1 und den Programmer Arduino as ISP. Jetzt kann wie gewohnt ihr Programm hochgeladen werden.
Für genauere Informationen Klicken Sie hier
Bitte nutzen Sie für PlatformIO Projekt unser Beispiel Projekt. Hier bei ist zu Beachten das in der platform.ini der upload_port angepasst werden muss.
- SV1 und SV2 sind eine 6-, 10-Pin AVR ISP Schittstelle.
- X1 ist ebenfalls eine ISP jedoch adoptiert auf den Parallelen Port des ATMega32 Board
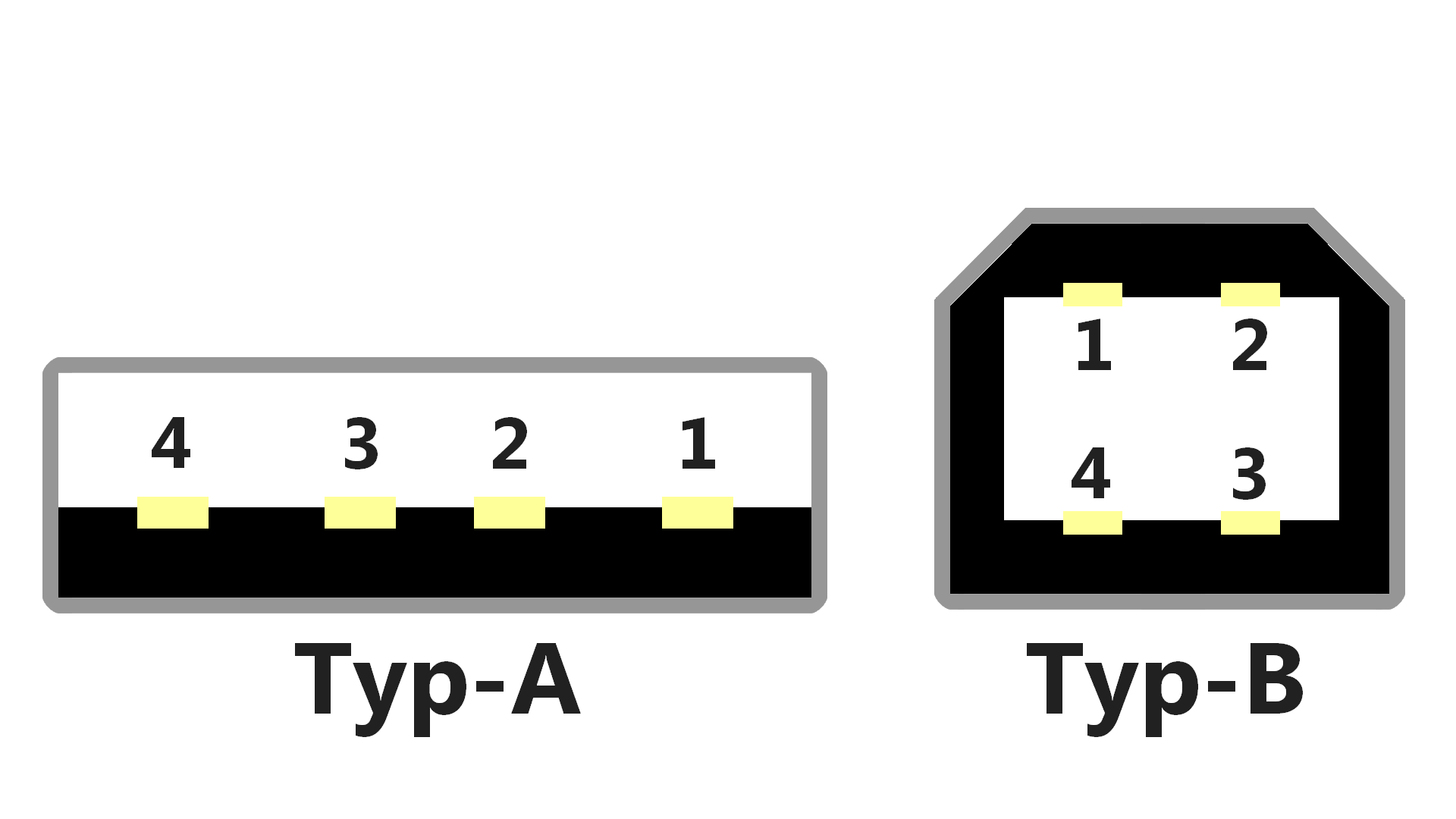
- X2 USB Type B zur Kommunikation mit dem PC.
{kind=link}
Die Leiterplatte hat verschiedene Zusatzkomponenten die für die Funktion nicht zwingen benötigt werden, jedoch zusätzliche sicherheiten gewähren.
- Entstörkondensatoren USB (C8, C9)
- ESD-Schutz Diodennetzwerk (U1)
- FT232: Reset Pulldown (R5)
- FT232: 3,3V Entstörer (C7)
Zum Programiren der ISP muss JP1 (1,2) und JP2 gesetzt werden. Nun kann mittels einer anderen ISP die Firmware geflasht werden. Zudem muss SV1 oder SV2 auf ein Programmiergerät gebückt werden, dies kann z.b. eine USBASP oder eine andere ISP sein.
Prüfen Sie die Stellung der Jumper!
- Begeben Sie sich in den Verzeichnis des Projektes.
- Prüfen Sie in der platform.ini ob Sie den richtigen upload_port gewählt haben.
- Öffenen Sie nun ein Terminal / CMD die PlatformIO CLI installiert hat.
- Setzen Sie die Fuses des Mikrocontrollers mit
pio run --target fuses. - Laden Sie nun die Firmware mit
pio run --target uploadhoch.
Bitte beachten Sie das der Jumper JP1 zur normalen nutzung wieder auf JP1 (2,3) gesetzt werden muss.
Siehe Stückliste für Bauteilinformation.

