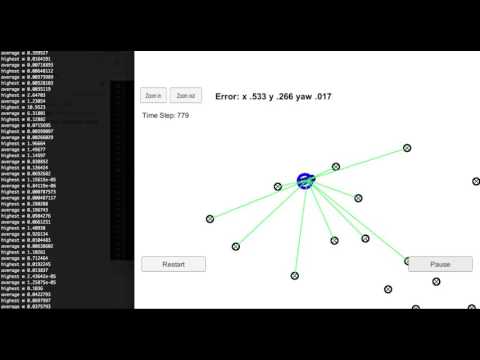
A 2 dimensional particle filter in C++. Takes as input a map and some initial localization information (analogous to what a GPS would provide) and at each time step the filter receives (noisy) sensor and control data.
> ./clean.sh
> ./build.sh
> ./run.sh
- Clone this repo.
- Make a build directory:
mkdir build && cd build - Compile:
cmake .. && make
- On windows, you may need to run:
cmake .. -G "Unix Makefiles" && make
- Run it:
./particle_filter
- Clone this repo.
- Make a build directory:
mkdir xcode-build && cd xcode-build - Run:
cmake -G Xcode ../ - Open
PARTICLE_FILTER.xcodeprojin xcode
You can find the inputs to the particle filter in the data directory.
map_data.txt includes the position of landmarks (in meters) on an arbitrary Cartesian coordinate system. Each row has three columns
- x position
- y position
- landmark id
- Map data provided by 3D Mapping Solutions GmbH.
control_data.txt contains rows of control data. Each row corresponds to the control data for the corresponding time step. The two columns represent
- vehicle speed (in meters per second)
- vehicle yaw rate (in radians per second)
The observation directory includes around 2000 files. Each file is numbered according to the timestep in which that observation takes place.
These files contain observation data for all "observable" landmarks. Here observable means the landmark is sufficiently close to the vehicle. Each row in these files corresponds to a single landmark. The two columns represent:
- x distance to the landmark in meters (right is positive) RELATIVE TO THE VEHICLE.
- y distance to the landmark in meters (forward is positive) RELATIVE TO THE VEHICLE.
NOTE The vehicle's coordinate system is NOT the map coordinate system.