{kind=link}
{kind=link}
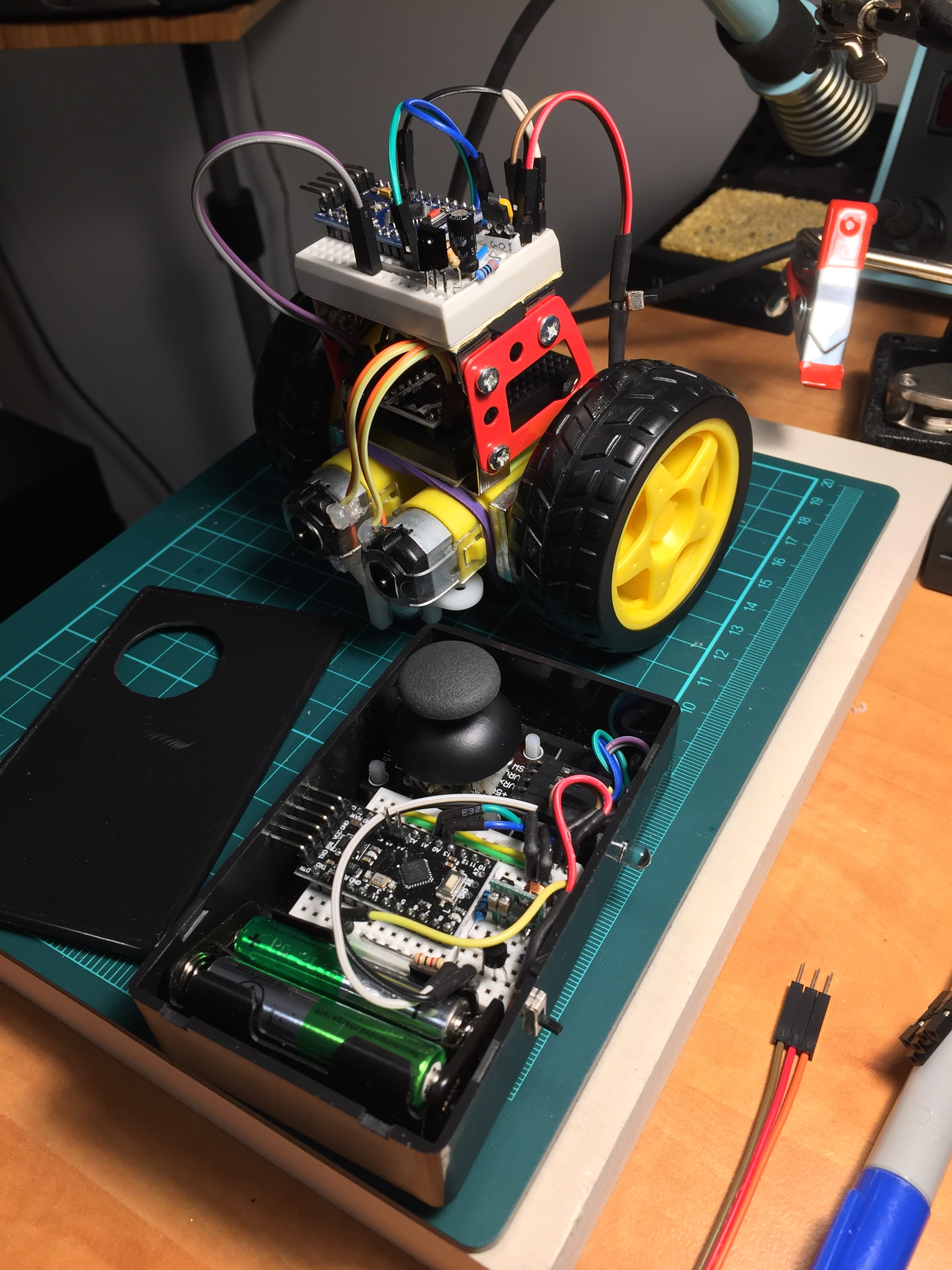
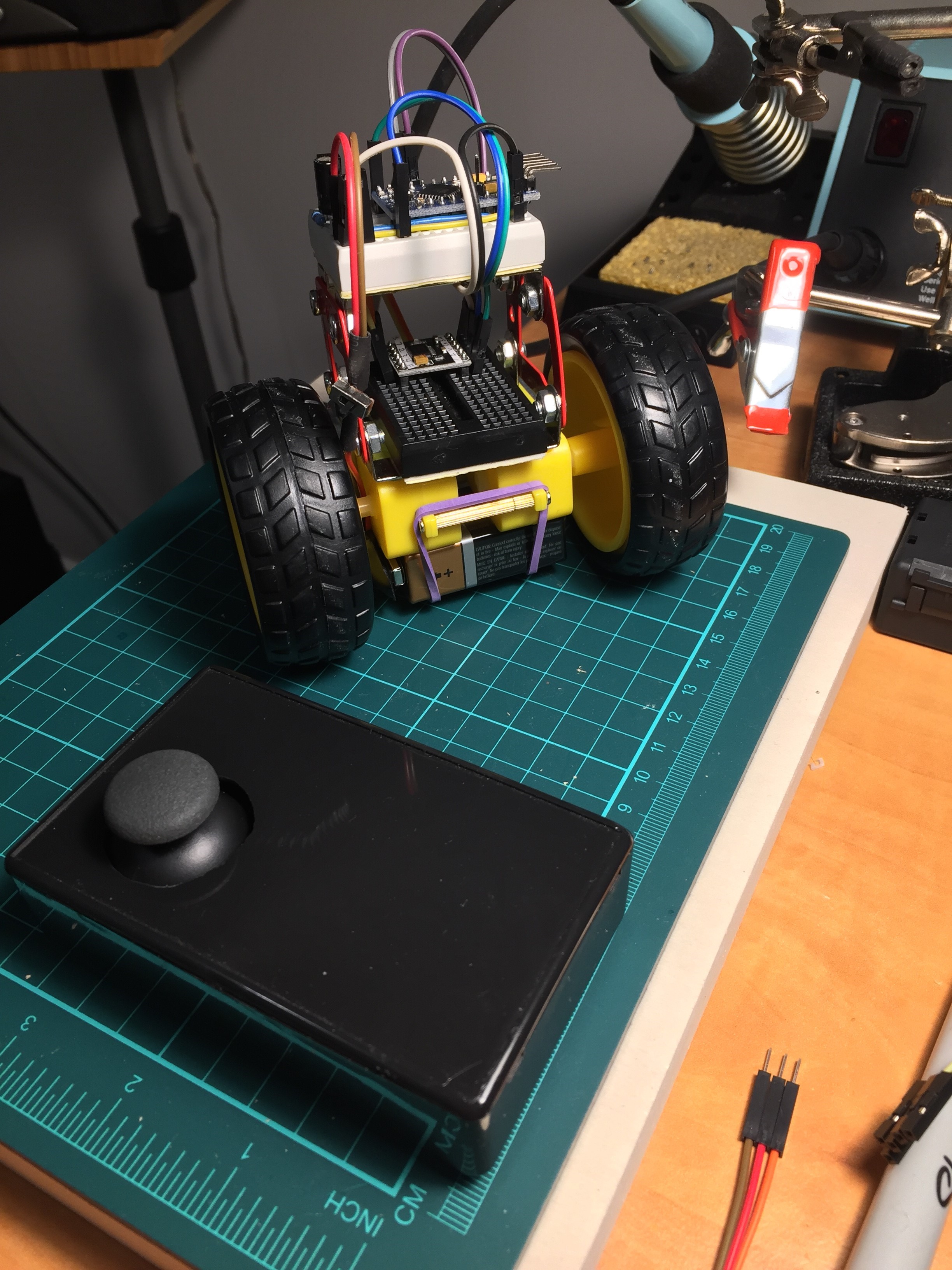
An Arduino based 2 wheeled robot controlled via a remote joystick. Data transmission is done via IR. The goal was to keep the robot small (still using breadboards).
Originally started with Attiny85 (Digispark) so I could keep everything on a single mini breadboard. Ran into a number of technical difficulties and so added the chassis.
Note: If using the Digispark board, use the built-in IRlib library instead IRemote or IRlib2.