Releases: scottbez1/splitflap
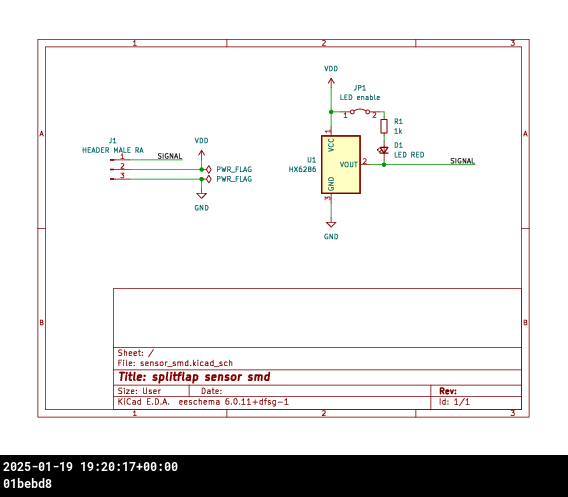
Sensor PCB (SMD) v2
The v2 release of the sensor PCB is designed for the v2 mechanics. These are not compatible with the older v0 mechanical designs.
They were redesigned for easier assembly (the hall effect sensor no longer needs to be soldered an exact distance from the PCB) and includes an optional LED for checking the magnet and sensor are working as expected (e.g. making sure orientation of the magnet is correct when assembling the display).
The v2 sensor PCB is available as a single board or as a panel of 6 PCBs with breakaway mousebites, and is optimized for partial assembly of all surface-mount components at JLCPCB. Gerbers for PCB production and BOM+placement files for assembly are provided.


Packs of 6 sensors are available mostly-assembled in the Bezek Labs store and come with the right-angle pin headers and magnets you'll need. Purchases support continued development of this project.
- Schematic pdf
- Interactive BOM (for manual assembly) interactive
- Fabrication files (single)
- Fabrication files (panelized)
- Purchase sensor kits in the US: Bezek Labs
Thank you!
Thank you to all contributors, GitHub sponsors, and a special shout out to Prototype-tier sponsors @xeokeri @yungwkndllc for your generous support of continued development of this and other projects!
Contributors
Assets 2
Mechanics v2
v2 is a long-awaited minor refresh of the mechanical and sensor design.



Big changes:
- 52 flaps per module for displaying more character/symbols than the previous 40 flap design
- New printed flap design ("Epilogue") with 52 flaps per set (see animation above), including several color-block flaps
- Updated enclosure and mechanical parts (laser-cut) to accommodate 52 flaps
- Motor wires now exit downward for less awkward wiring!
- New v2 sensor PCB that's easier to assemble and includes an LED for checking the magnet status
- Software-configurable calibration rather than mechanical sensor adjustment
But many things have stayed the same for easy upgrades/compatibility:
- No change to flap dimensions!
- No changes to Chainlink Driver, Chainlink Buddy boards, or system architecture!
- 40-flap modules are still an officially supported option!
- Open source, as always!
52-flap module option - recommended

Instructions: v2 assembly guide
Module dimensions:
Artifacts:
- For Ponoko 3mm MDF (svg)
- For Ponoko 3mm acrylic (svg)
- For generic material (0.18mm kerf correction) (svg)
- For Elecrow 3mm Wood (zipped pdf)
- For Elecrow 3mm Acrylic (zipped pdf)
40-flap module option

Instructions: v2 assembly guide
Module dimensions:
Artifacts:
- For Ponoko 3mm MDF (svg)
- For Ponoko 3mm acrylic (svg)
- For generic material (0.18mm kerf correction) (svg)
- For Elecrow 3mm Wood (zipped pdf)
- For Elecrow 3mm Acrylic (zipped pdf)
Thank you!
Thank you to all contributors (including @shamlian, @Johnr24, @len0rd, @scauligi, @reedy, @skofgar, @kitlaan, @dmadison for hardware and software contributions since the last mechanical release), GitHub sponsors at all tiers, and a special shout out to Prototype-tier GitHub sponsors @xeokeri and @yungwkndllc for your generous support of continued development of this and other projects!
Contributors
Assets 2
Sensor PCB v1.1

Chainlink Driver v1.1



Chainlink Buddy [T-Display] v1.0



Chainlink Buddy [Breadboard] v1.0



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
v0.7 - Mechanics
This is mostly a minor mechanical update, with a handful of small but useful improvements, but there are some breaking dimensional changes to be aware of if you are planning to extend an existing v0.6 display (see below). A huge thanks to @dmadison for all the excellent contributions!
Breaking Changes
Thickness fix and tolerances
The design has been modified to match the 3.0mm nominal material thickness available at Ponoko and elsewhere, rather than using a value of 3.2mm which was based on incorrect material information Ponoko had previously published.
Since thickness is a key variable across the entire design, this results in breaking (though small) dimensional changes compared to previous versions; if you have previously built modules using v0.6, you should continue to use v0.6 when building additional modules instead of updating to v0.7.
Highlighting a few key dimensional changes:
| Dimension | v0.6 | v0.7 |
|---|---|---|
| enclosure_height | 148.786 | 147.786 |
| enclosure_width | 82.2 | 82.6 |
| front_window_width | 55.5 | 55.9 |
As part of this change (#93), additional tolerances were added to ensure pieces fit well together in practice instead of relying on laser kerf (i.e. an under-sized kerf_width compensation value) to make up for the zero-tolerance fits.
New Features
Sensor spacing jig



This laser-cut jig (part of the main laser-cut design) sets the proper spacing between the hall effect sensor and PCB when assembling the sensor boards.
You can find it inside the motor cutout in the laser-cut file (highlighted in red in the image to the right).
From #101
Spool home position indicators

The top half of the "home" character (by default, this would be the top flap of the blank/space) should be inserted into the spool holes indicated for proper alignment of the home position relative to the magnet/home-position sensor.
From #102
Assembly alignment indicators



The front face has an "up" arrow (since it's easy to accidentally insert it upside-down/inside-out), and there are circle and triangle indicators to help make sure you insert the sides correctly too!
From #111
Zip tie cable management



Designed for small (e.g. 2.5mm width) zip ties.
From #109
Optional inter-module alignment bar

From #142
v0.6 - Mechanics
Very minor mechanics change from v0.5 - the spool strut tab is now "stepped" so that the distance between the spool walls doesn't depend on the exact thickness of material used. This should avoid issues with flaps binding against the walls of the spool if the material thickness is below spec (e.g. when ordering from Elecrow which seems to be ~2.8mm thickness rather than 3mm). See animation:

Also, based on feedback from someone who ordered recently, I'm generating a separate Acrylic laser-cutting file with a smaller kerf correction value than Ponoko specifies to hopefully avoid slightly oversized parts that require sanding/filing to fit together.
v0.5 (PCB + Mechanics)
This is the latest design using hall-effect sensors (rather than IR reflectance sensors), and also includes a slightly refreshed controller PCB design.
Note that the controller PCB changes are considered minor and unrelated to the sensor change. That is, you can use the new hall-effect sensors with older controller boards, and likewise, the new controller design will still work with the older IR reflectance sensors.
Major changes:
- PCB for sensors is now a separate, panelized design, rather than an alternate configuration on half of the controller PCB. For small quantities, they're available in inexpensive packs of 4 on Tindie so you don't have to order a full panelized pack of 200 of them. You can also now omit the sensor PCB entirely if desired, as documented in the wiki
- Mechanical design updated for hall-effect sensor board and magnet
Minor changes:
- Controller PCB now has a jumper to optionally power the Arduino from the Motor supply (so it can be used without being plugged into USB)
- Controller PCB now plugs into additional Arduino pins for better physical stability
- Controller PCB now has better mounting holes, including holes to optionally attach it to the Arduino using standoffs
- Controller PCB now has a pull-down resistor on the sensor input shift register to avoid phantom inputs when expansion boards aren't connected
- Mechanical design now includes inter-module connector pieces for optionally joining adjacent modules
v0.4 (Mechanics - gearless)
- Eliminates all gears - the spool is now directly driven by the motor for less mechanical complexity
- Adds an optional connector piece for loosely attaching adjacent modules to each other, and a 4mm hole on the top and bottom to allow modules to be attached to an external structure if desired
- This is the design seen in https://www.youtube.com/watch?v=vq4o_88kN8g (all 4 modules)