ROS wrapper for the galaxy camera made by Daheng Imaging.
Dependencies:
- ROS Melodic
- gxiapi
ONLY TESTED ON MER-139!!!
- ROS - http://wiki.ros.org/ROS
- gxiapi: - download
Galaxy_Linux-x86_Gige-U3_32bits-64bits_1.2.1911.9122from http://gb.daheng-imaging.com/CN/Software and install
This is a ros_packages,you should put it in your ROS workspace.
- Get the source:
git clone git@github.com:QiayuanLiao/git@github.com:QiayuanLiao/galaxy_camera.git
- Make in your workspace
catkin_make
source devel/setup.bash
- Connect the camera by USB, run:
roslaunch galaxy_camera MER-139.launch
check the image on rqt_image_view.
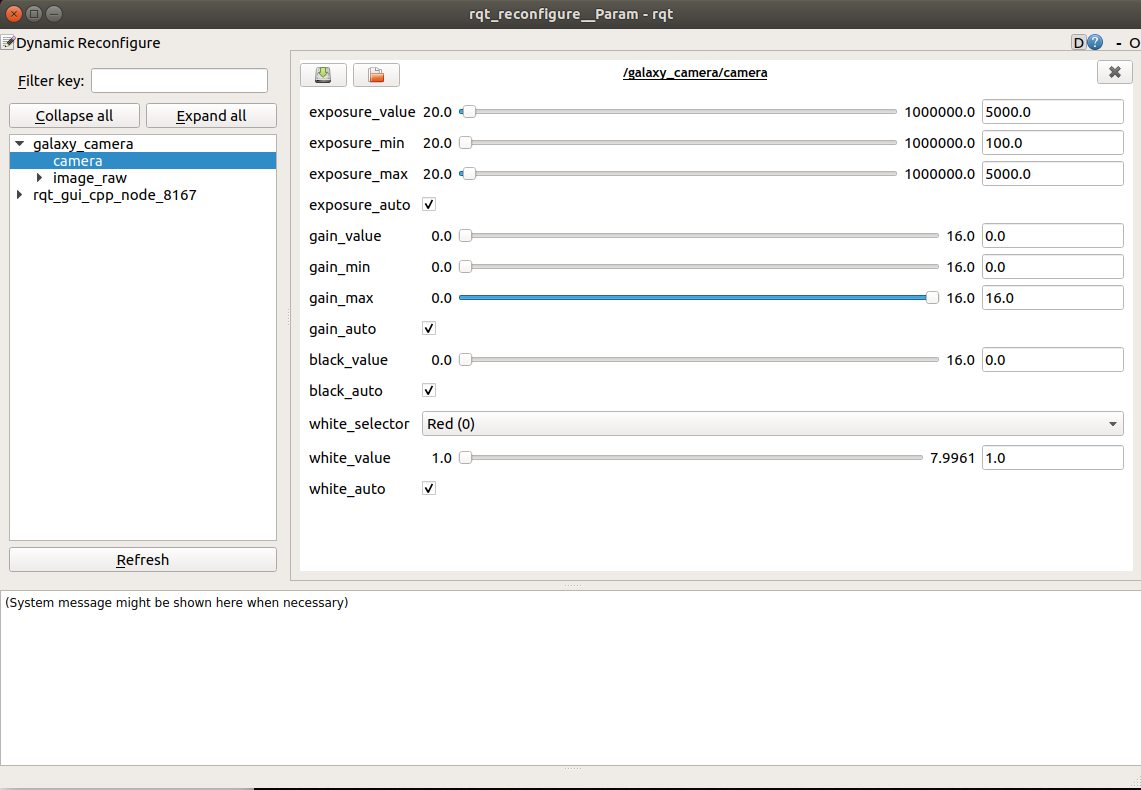
- Adjust the params by rqt_reconfigure:
rosrun rqt_reconfigure rqt_reconfigure
- Calibrate:
rosrun camera_calibration cameracalibrator.py --size 11x8 --square 0.020 image:=/galaxy_camera/galaxy_camera/image_raw camera:=/galaxy_camera
- size:是内部角点的数量,不是棋盘格的格子数(应为棋盘格的长宽都-1,队里的为11x8(12x9分别-1))
- More information: http://wiki.ros.org/image_pipeline
- Multi-camera support
- nodelet support
- test on other device