Export URDF in Solidworks
-
-
[생략가능].NET Framework V4 설치 및 업그레이드
-
sw_urdf_exporter 다운로드
-
설치
- sw2urdfSetup.exe 실행 설치
-
-
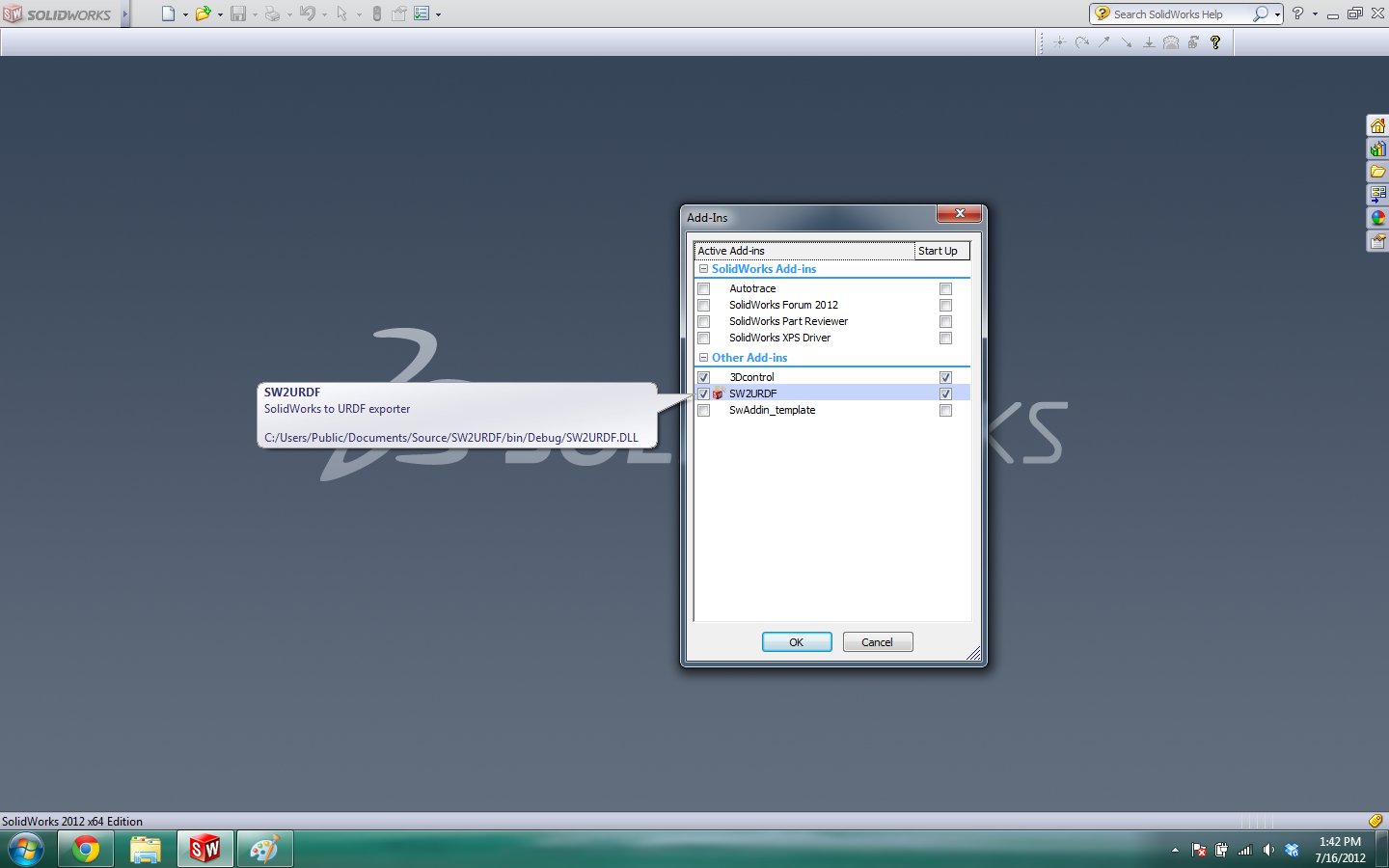
- Solidwokrs상에서 "Tools>Add-ins"에서 SW2URDF 체크박스 선택하여 애드인 설정
- Solidwokrs상에서 "Tools>Add-ins"에서 SW2URDF 체크박스 선택하여 애드인 설정
-
- 최상위 어셈블리 트리상에 Link 모델이 되도록 어셈블리 재구성
- Link 모델간의 mate 조건을 추가하여 구속조건 부여 (joint의 특성에 맞도록 구속조건 부여)
- 어셈블리 및 파트의 물성치 설정 및 입력
- 어셈블리 원점 및 좌표계 확인
- 어셈블리 및 파트의 색상 및 텍스쳐 설정
-
-
Solidworks상의 메뉴에서 "File > Export to URDF" 실행
-
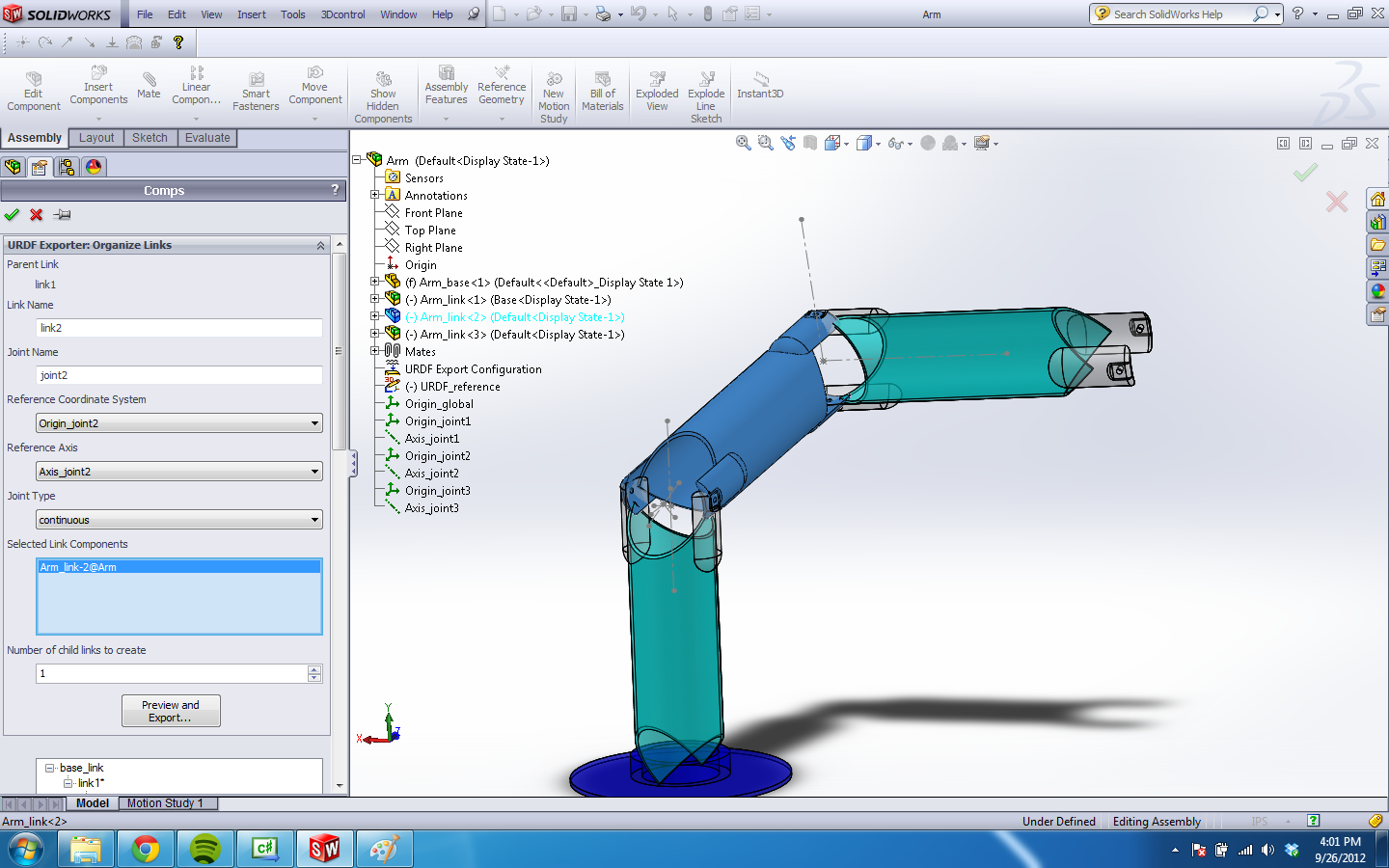
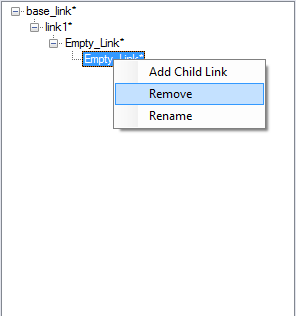
좌측 툴바상에서 모델 트리 생성 및 변경(Link_name / Joint_name / select_component / coordinate_system / joint_type )
-
모델트리 완성 후, "Preview and Export"클릭하여 내보내기 실행
-
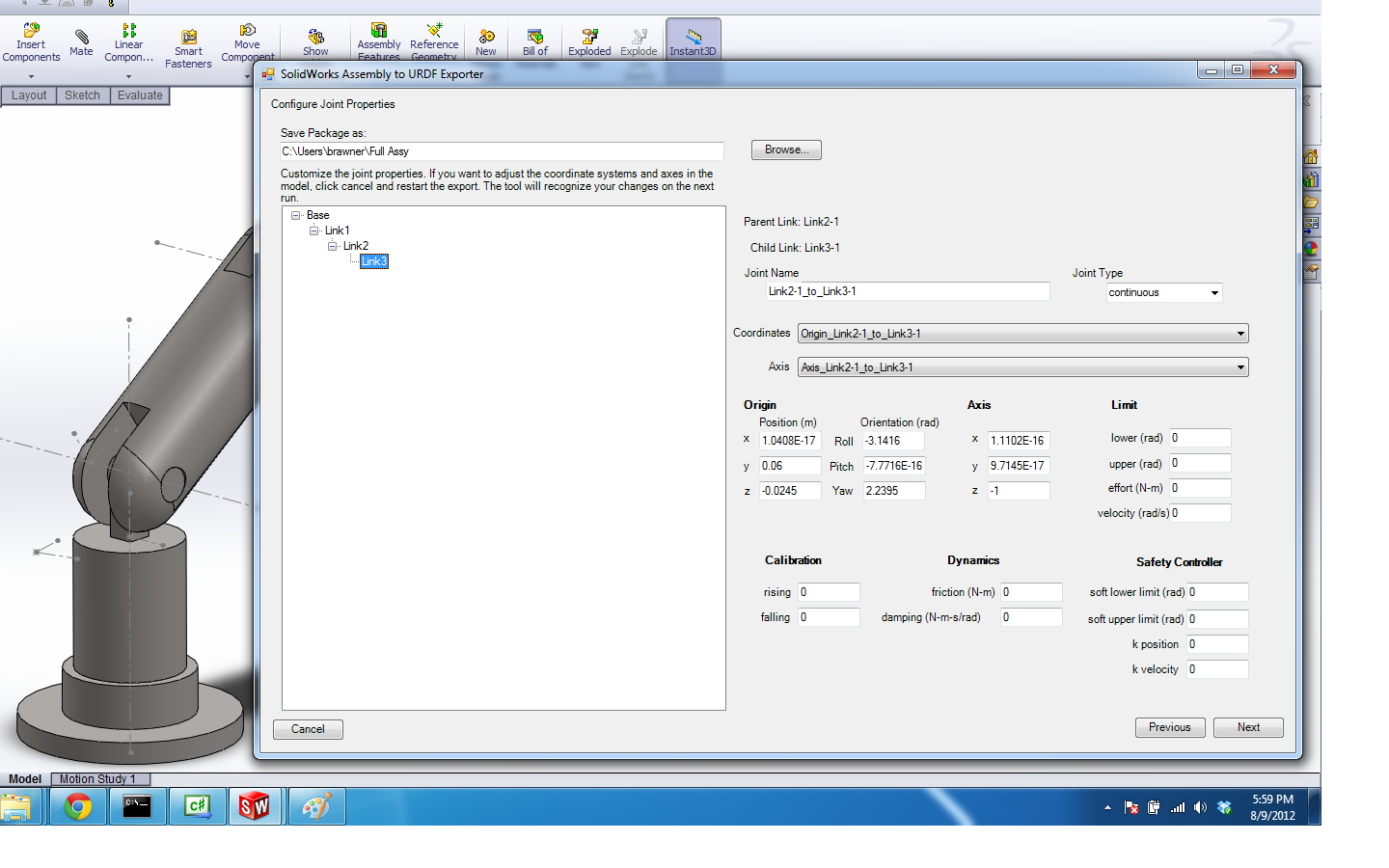
Joint Property 설정(조인트타입/축방향/원점위치 등 확인)
-
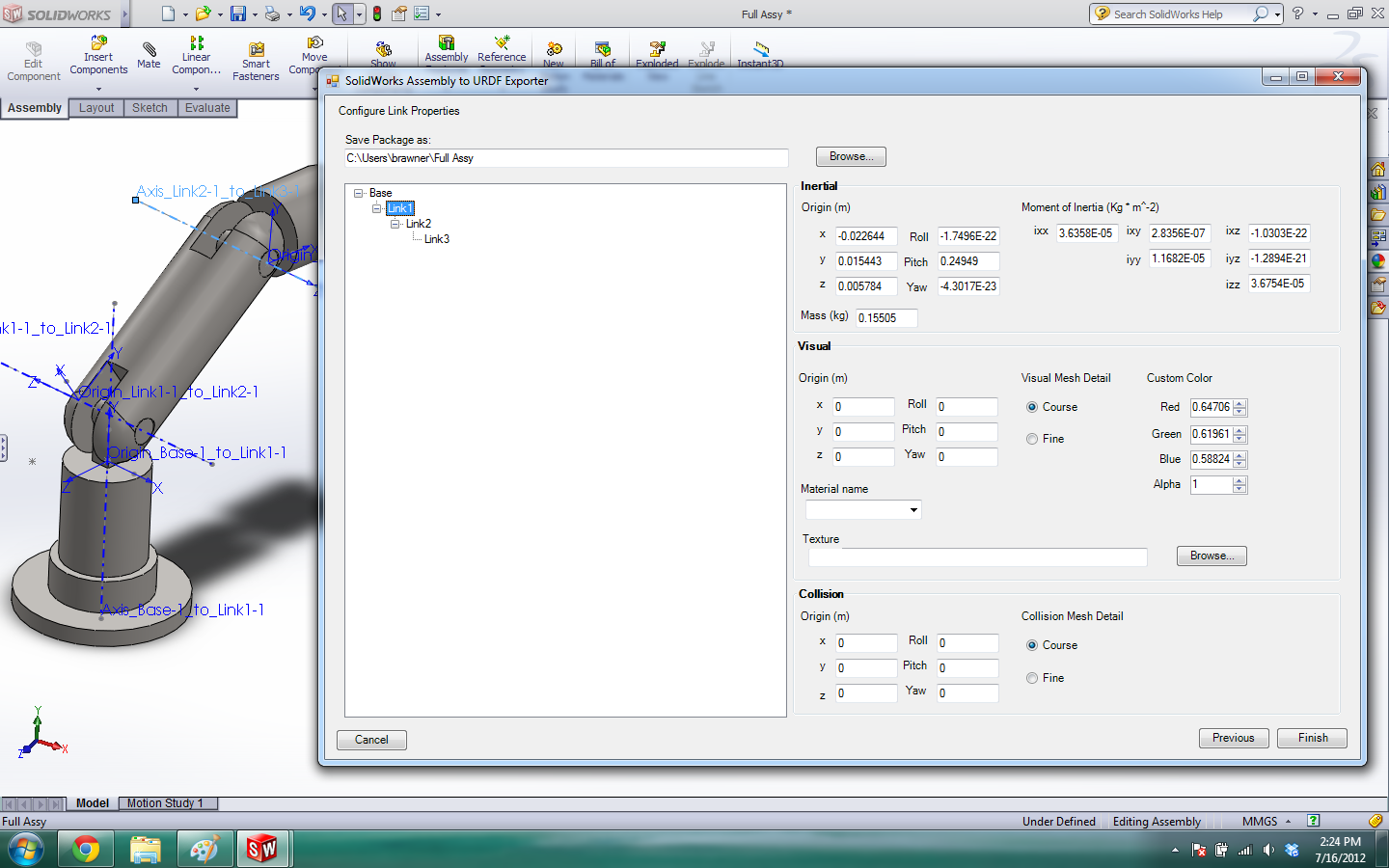
Link Property 설정(원점/관성모멘트/Visual/Collision요소 등 확인)
-
Finish버튼을 클릭하여, urdf가 저장될 폴더 및 패키지이름 설정하여 저장 완료
-
-
- [package_name]folder
- [config]folder
- joint_names_(package_name).yaml
- [launch]folder
- display.launch
- gazebo.launch
- [meshes]folder
- (link1_name).stl
- ...
- (linkn_name).stl
- [textures]folder
- [urdf]folder
- (package_name).urdf
- CMakeLists.txt
- package.xml
- [config]folder
- [package_name]folder
-
sample cad model
https://grabcad.com/library/eod-robot-1
https://grabcad.com/library/mobile-robot-v-2-0-1
https://grabcad.com/library/victim-search-robot-1 -
A Design Guide for Proper Exporting from Solidworks for Gazebo Simulation
http://blogs.solidworks.com/teacher/wp-content/uploads/sites/3/WPI-Robotics-SolidWorks-to-Gazebo.pdf -
Install Solidworks URDF exporter
http://wiki.ros.org/sw_urdf_exporter -
Export a SolidWorks Assembly to URDF
http://wiki.ros.org/sw_urdf_exporter/Tutorials/Export%20an%20Assembly
https://usfirst.collab.net/sf/go/projects.solidworks_robot_exporter/frs.solidworks_gazebo_export_plugin
* (latest released : 09/01/2015 7:44 PM)
https://s3.amazonaws.com/screensteps_live/exported/Wpilib/2078/2237/Exporting_overview.pdf?1478643518
https://www.youtube.com/watch?v=O_oK98bh5E0
https://usfirst.collab.net/sf/go/projects.solidworks_robot_exporter/frs.solidworks_gazebo_export_plugin
https://s3.amazonaws.com/screensteps_live/exported/Wpilib/2078/2237/Exporting_overview.pdf?1478643518