URDF vs. SDF
- 기본 구성요소
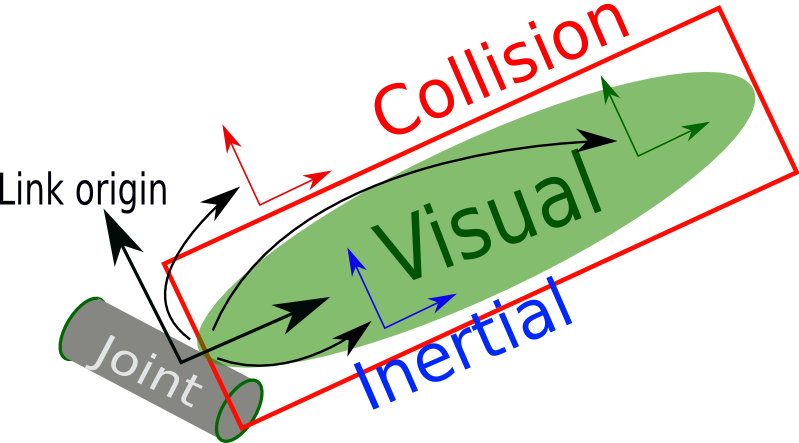
- Links
- 'Link'는 모델상의 하나의 body의 물리적인 속성을 포함한다.(바퀴,링크,실린더,구 등)
각각의 'link'는 다수의 collision, visual 및 sensor 요소를 하위요소로 가질 수 있다.
- Collision : 'collision' 요소는 다른 요소와의 충돌을 체크하기 위한 geometry 요소를 지닌다.
'collision geometry'는 단순형상 혹은 삼각형의 메쉬가 될 수 있다. (*.dae, *.stl)
- Visual : 'visual' 요소는 'link'요소의 시각화를 위해 사용되어 진다. (*.dae, *.stl 지원)
- Inertial : 'inertial' 요소는 'link'의 동적 속성을 기술한다. (질량, 회전관성모멘트 등)
- Sensor
- 'sensor' 요소는 추가된 plugin을 통해 'world'로부터 특정 가상 센서의 데이터를 취득한다.
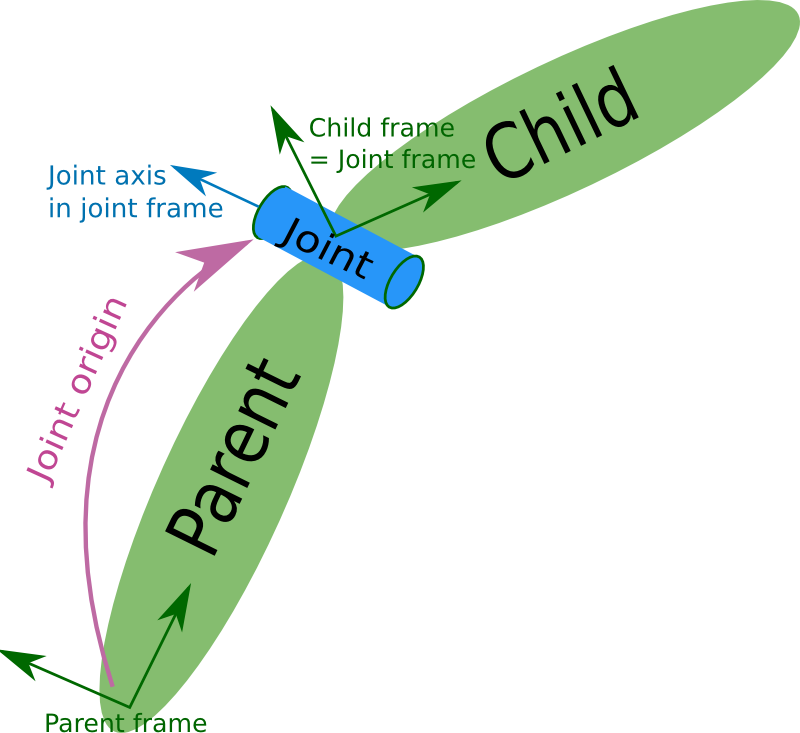
- Joints
- 'joint' 요소는 서로다른 두개의 'link'간의 구속관계를 표현한다.
- 'parent' 와 'child' 간의 회전축/이동조인트/고정조인트 등의 구속조건을 제공한다.
- 'joint limit' 을 통해 조인트의 이동가능 범위를 제한한다.
- Transmission
- link와 link간의 연결되는 joint의 감속기를 적용할때 사용한다.
- Plugins
- 모델을 제어하기 위해 controller와 'shared library'를 통해 토픽/프레임 등을 공유한다..
-
- An XML format for representing a robot model
- The description of a robot consists of a set of link (part) elements, and a set of joint elements connecting the links together
- description of kinematic and dynamic description of the robot
- description of visual representation of the robot
- description of collision model of the robot
- http://wiki.ros.org/urdf/Examples
-
- An XML format that describes objects and environments for robot simulators, visualization, and control
- It contains a complete description for everything from the world level down to the robot level, including:
- Scene: Ambient lighting, sky properties, shadows.
- Physics: Gravity, time step, physics engine.
- Models: Collection of links, collision objects, joints, and sensors.
- Lights: Point, spot, and directional light sources.
- Plugins: World, model, sensor, and system plugins.
- http://gazebosim.org/sdf.html
-
-
URDF는 하나의 'robot' 모델에 대해 기술하는 포맷이며, 'world'상에서 'robot'의 포즈를 결정 할 수 없는 단점이 있다.
-
SDF는 'world'상에서 여러개의 'robot' 모델의 포즈를 정의할 수 있을 뿐 만 아니라, 모델간의 'friction' 및 'light', 'heightmaps' 등의 'world'속성 정의도 가능하다.
-
구조적 차이점
URDF
<?xml version="1.0"?> <robot name="my_robot"> <link name="link"> <visual> <origin rpy="1.57075 0 0" xyz="0 0 0"/> </visual> ... </link> <joint name="joint1" type="fixed"> ... </joint> <plugin filename="libMyPlugin.so" name="my_plugin"/> </robot>SDF
<?xml version="1.0" ?> <sdf version="1.5"> <world name="default"> <physics type="ode"> ... </physics> <scene> ... </scene> <light> ... </light> </world> <model name="box"> <pose>0 0 0.5 0 0 0</pose> <static>false</static> <link name="link"> <pose>0 0 0 0 0 0</pose> ... </link> <joint type="revolute" name="my_joint"> ... </joint> <plugin filename="libMyPlugin.so" name="my_plugin"/> </model> </sdf>
-
-
Xacro (XML Macros)
- Xacro 는 XML macro 언어로써, 반복되는 작업을 모듈화하여 재사용성이 용이하도록 도와준다.
- http://wiki.ros.org/xacro
-
example
-
sample
<xacro:macro name="pr2_arm" params="suffix parent reflect"> <pr2_upperarm suffix="${suffix}" reflect="${reflect}" parent="${parent}" /> <pr2_forearm suffix="${suffix}" reflect="${reflect}" parent="elbow_flex_${suffix}" /> </xacro:macro> <xacro:pr2_arm suffix="left" reflect="1" parent="torso" /> <xacro:pr2_arm suffix="right" reflect="-1" parent="torso" />original
<pr2_upperarm suffix="left" reflect="1" parent="torso" /> <pr2_forearm suffix="left" reflect="1" parent="elbow_flex_left" /> <pr2_upperarm suffix="right" reflect="-1" parent="torso" /> <pr2_forearm suffix="right" reflect="-1" parent="elbow_flex_right" />
-
- 기본 구조
<robot> <link> <visual> <origin/> <geometry/> <meterial/> </visual> <inetial> <origin/> <mass/> <inertia/> </inertial> <collision> <origin/> <geometry/> </collision> </link> <joint name=" " type="fixed"> <origin/> <parent/> <child/> <axis/> <dynamics> <damping/> <friction/> </dynamics> <limit> <upper/> <lower/> <effort/> <velocity/> </joint> <sensor> <camera> <image> <width/><height/><format/><hfov/><near/><far/> </image> </camera> </sensor> </robot>.
- link 예제
<link name="base_link"> <visual> <origin rpy="1.57075 0 0" xyz="0 0 0"/> <geometry> <cylinder length="0.6" radius="0.2"/> </geometry> <material name="blue"> <color rgba="0 0 .8 1"/> </material> </visual> <collision> <origin rpy="1.57075 0 0" xyz="0 0 0"/> <geometry> <cylinder length="0.6" radius="0.2"/> </geometry> </collision> <inertial> <mass value="10"/> <origin xyz="-0.001201 0.024513 -0.098231" rpy="0 0 0"/> <inertia ixx="1.0" ixy="0.0" ixz="0.0" iyy="1.0" iyz="0.0" izz="1.0"/> </inertial> </link>- joint 예제
<joint name="right_gripper_joint" type="revolute"> <axis xyz="0 0 -1"/> <limit effort="1000.0" lower="0.0" upper="0.548" velocity="0.5"/> <origin rpy="0 0 0" xyz="0.2 -0.01 0"/> <parent link="gripper_pole"/> <child link="right_gripper"/> </joint>- plugin 예제
<gazebo> <plugin name="differential_drive_controller" filename="libdiffdrive_plugin.so"> ... plugin parameters ... </plugin> </gazebo> -
-
(example) Gazebo-9DOF-arm
-
(example) Willowgarage Model SDF File
<?xml version="1.0" ?> <sdf version="1.4"> <model name="willowgarage"> <static>true</static> <pose>-20 -20 0 0 0 0</pose> <link name="walls"> <collision name="collision"> <geometry> <mesh> <uri>model://willowgarage/meshes/willowgarage_collision.dae</uri> </mesh> </geometry> </collision> <visual name="visual"> <geometry> <mesh> <uri>model://willowgarage/meshes/willowgarage_visual.dae</uri> </mesh> </geometry> <cast_shadows>false</cast_shadows> </visual> </link> </model> </sdf> -
link 예제 (link)
<link name="trunk"> <pose>0.0 0.0 1.051 0.0 0.0 0.0</pose> <!-- Height of leg + thigh + 0.5 * trunk--> <inertial> <mass>37.0762</mass> <pose>0.0 0.0 0.0 0.0 0.0 0.0</pose> <!-- Link mass is centered --> <inertia> <ixx>1.674614776</ixx> <ixy>0.0</ixy> <ixz>0.0</ixz> <iyz>0.0</iyz> <iyy>0.01679029</iyy> <izz>1.674614776</izz> </inertia> </inertial> <collision name="collision"> <pose>0 0 0.5 0 0 0</pose> <geometry> <cylinder> <length>0.376</length> <radius>0.02</radius> </cylinder> </geometry> </collision> <visual name="visual"> <geometry> <cylinder> <length>0.376</length> <radius>0.02</radius> </cylinder> </geometry> </visual> <sensor name="trunk_contact" type="contact"> <contact> <collision>collision</collision> </contact> </sensor> </link> -
joint 예제 (link)
<joint name="right_ankle" type="revolute"> <parent>right_leg</parent> <child>right_foot</child> <pose>0.0 0.0 -0.041 0.0 -1.570796327 0.0</pose> <axis> <xyz>0.0 1 0.0</xyz> <limit> <lower>-0.680678408</lower> <upper>0.726056969</upper> </limit> <dynamics> <damping>0.05</damping> </dynamics> </axis> </joint> -
plugin 예제
<model name="your_robot_model"> <plugin name="differential_drive_controller" filename="libdiffdrive_plugin.so"> ... plugin parameters ... </plugin> </model>
-
-
설치
sudo apt-get install liburdfdom-tools -
URDF 문법검사
- 방법1
$ check_urdf myrobot.urdf - 방법2
$ rosrun urdf_parser check_urdf myrobot.urdf
- 방법1
-
URDF 그래프표시
- 방법1
$ urdf_to_graphiz myrobot.urdf$ evince myrobot.pdf - 방법2
$ rosrun urdf_parser urdf_to_graphiz brazo.urdf
- 방법1
- Gazebbo 7.0 이전 버전
$ gzsdf print urdfname.urdf > newname.sdf - Gazebbo 7.0 이전 버전
$ gz sdf --print my_urdf.urdf > my_sdf.sdf - alt)
$ /usr/local/Cellar/gazebo8/8.1.0/bin/gz sdf --convert simple_box.urdf
-
URDF XML specifications
http://wiki.ros.org/urdf/XML -
URDF Tutorials
http://wiki.ros.org/urdf/Tutorials -
Using a URDF in Gazebo
http://gazebosim.org/tutorials/?tut=ros_urdf -
Understanding URDF and XACRO
https://ni.www.techfak.uni-bielefeld.de/files/URDF-XACRO.pdf -
SDF format
http://sdformat.org/spec -
Using Gazebo plugins with ROS
http://gazebosim.org/tutorials?tut=ros_gzplugins -
blog) URDF Reference
http://enesbot.me/urdf-reference.html -
blog) Gazebo Mobile 로봇 모델 만들기
https://opentutorials.org/course/2845/16603 -
Introduction to Robotics with ROS
https://u.cs.biu.ac.il/~yehoshr1/89-685/ -
Programming for Robotics Introduction to ROS
https://www.ethz.ch/content/dam/ethz/special-interest/mavt/robotics-n-intelligent-systems/rsl-dam/ROS2017/lecture3.pdf -
ROS lecturenote (urdf sdf)
https://u.cs.biu.ac.il/~yehoshr1/89-685/Fall2015/ROS_Lesson9.pdf